Synchronization Tools
A cooperating process is one that can affect or be affected by other processes executing in the system. Cooperating processes can either directly share a logical address space (that is, both code and data) or be allowed to share data only through shared memory or message passing. Concurrent access to shared data may result in data inconsistency, however. In this chapter, we discuss various mechanisms to ensure the orderly execution of cooperating processes that share a logical address space, so that data consistency is maintained.
Chapter Objectives
- Describe the critical-section problem and illustrate a race condition.
- Illustrate hardware solutions to the critical-section problem using memory barriers, compare-and-swap operations, and atomic variables.
- Demonstrate how mutex locks, semaphores, monitors, and condition variables can be used to solve the critical-section problem.
- Evaluate tools that solve the critical-section problem in low-, moderate-, and high-contention scenarios.
6.1 Background
We've already seen that processes can execute concurrently or in parallel. Section 3.2.2 introduced the role of process scheduling and described how the CPU scheduler switches rapidly between processes to provide concurrent execution. This means that one process may only partially complete execution before another process is scheduled. In fact, a process may be interrupted at any point in its instruction stream, and the processing core may be assigned to execute instructions of another process. Additionally, Section 4.2 introduced parallel execution, in which two instruction streams (representing different processes) execute simultaneously on separate processing cores. In this chapter, we explain how concurrent or parallel execution can contribute to issues involving the integrity of data shared by several processes.
Let's consider an example of how this can happen. In Chapter 3, we developed a model of a system consisting of cooperating sequential processes or threads, all running asynchronously and possibly sharing data. We illustrated this model with the producer-consumer problem, which is a representative paradigm of many operating system functions. Specifically, in Section 3.5, we described how a bounded buffer could be used to enable processes to share memory.
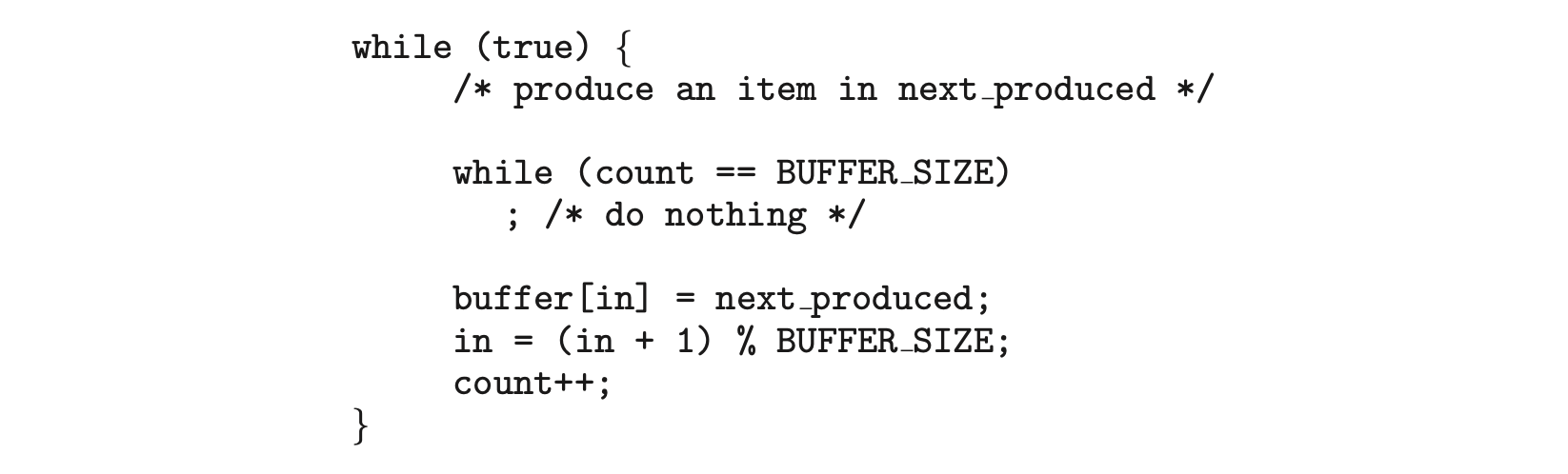
We now return to our consideration of the bounded buffer. As we pointed out, our original solution allowed at most BUFFER_SIZE - 1 items in the buffer at the same time. Suppose we want to modify the algorithm to remedy this deficiency. One possibility is to add an integer variable, count, initialized to 0. count is incremented every time we add a new item to the buffer and is decremented every time we remove one item from the buffer. The code for the producer process can be modified as follows:
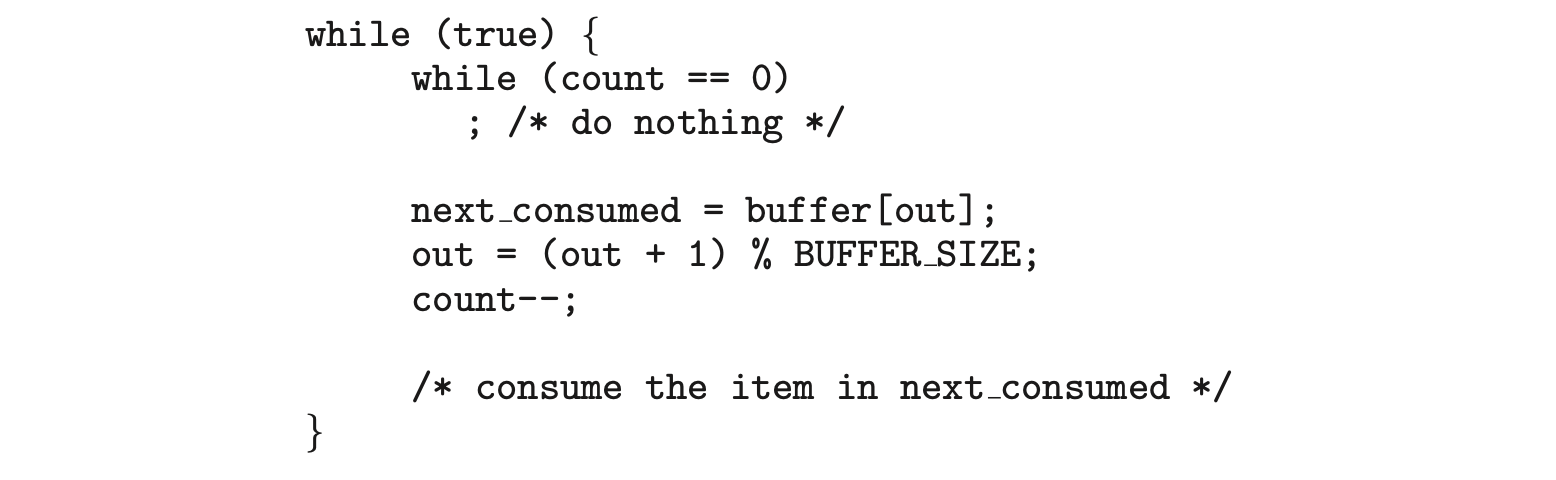
The code for the consumer process can be modified as follows:
 Although the producer and consumer routines shown above are correct separately, they may not function correctly when executed concurrently. As an illustration, suppose that the value of the variable count is currently 5 and that the producer and consumer processes concurrently execute the statements "
Although the producer and consumer routines shown above are correct separately, they may not function correctly when executed concurrently. As an illustration, suppose that the value of the variable count is currently 5 and that the producer and consumer processes concurrently execute the statements "count++" and "count--". Following the execution of these two statements, the value of the variable count may be 4, 5, or 6! The only correct result, though, is count == 5, which is generated correctly if the producer and consumer execute separately.
We can show that the value of count may be incorrect as follows. Note that the statement "count++" may be implemented in machine language (on a typical machine) as follows:
 where is one of the local CPU registers. Similarly, the statement "count-" is implemented as follows:
where is one of the local CPU registers. Similarly, the statement "count-" is implemented as follows:

where again is one of the local CPU registers. Even though and may be the same physical register, remember that the contents of this register will be saved and restored by the interrupt handler (Section 1.2.3).
The concurrent execution of "count++" and "count--" is equivalent to a sequential execution in which the lower-level statements presented previously are interleaved in some arbitrary order (but the order within each high-level statement is preserved). One such interleaving is the following:
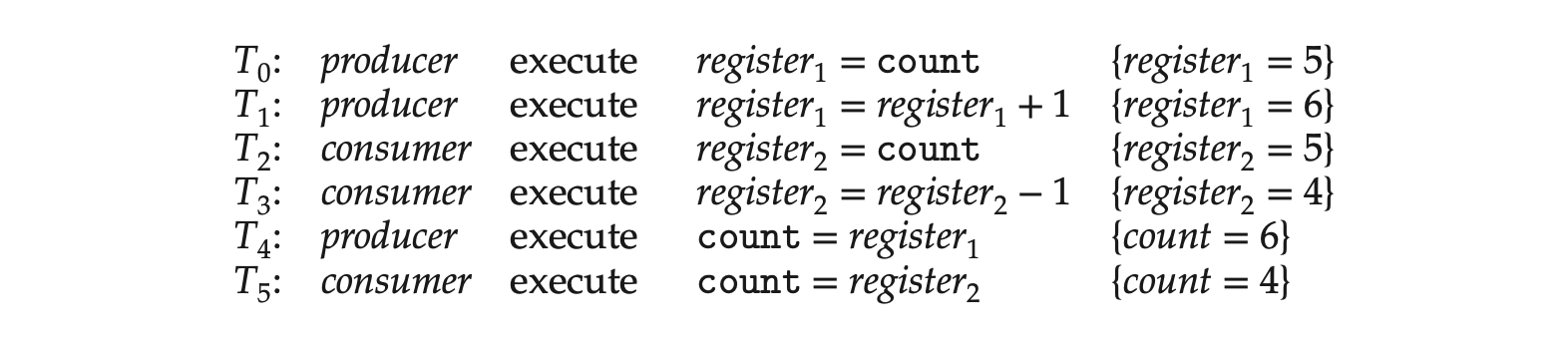
Notice that we have arrived at the incorrect state "count == 4", indicating that four buffers are full, when, in fact, five buffers are full. If we reversed the order of the statements at and , we would arrive at the incorrect state "count == 6".
We would arrive at this incorrect state because we allowed both processes to manipulate the variable count concurrently. A situation like this, where several processes access and manipulate the same data concurrently and the outcome of the execution depends on the particular order in which the access takes place, is called a race condition. To guard against the race condition above, we need to ensure that only one process at a time can be manipulating the variable count. To make such a guarantee, we require that the processes be synchronized in some way.
Situations such as the one just described occur frequently in operating systems as different parts of the system manipulate resources. Furthermore, as we have emphasized in earlier chapters, the prominence of multicore systems has brought an increased emphasis on developing multithreaded applications. In such applications, several threads--which are quite possibly sharing data--are running in parallel on different processing cores. Clearly, we want any changes that result from such activities not to interfere with one another. Because of the importance of this issue, we devote a major portion of this chapter to process synchronization and coordination among cooperating processes.
6.2 The Critical-Section Problem
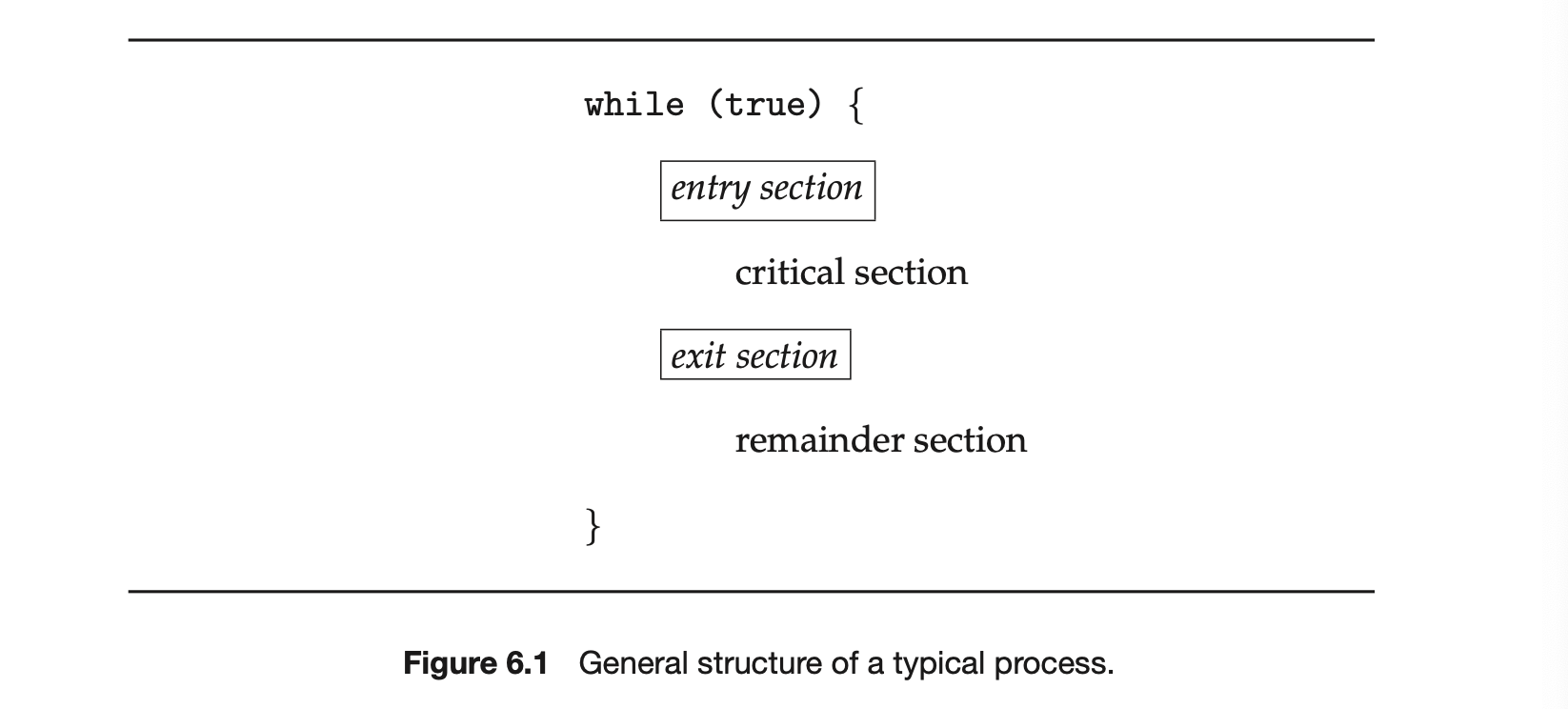
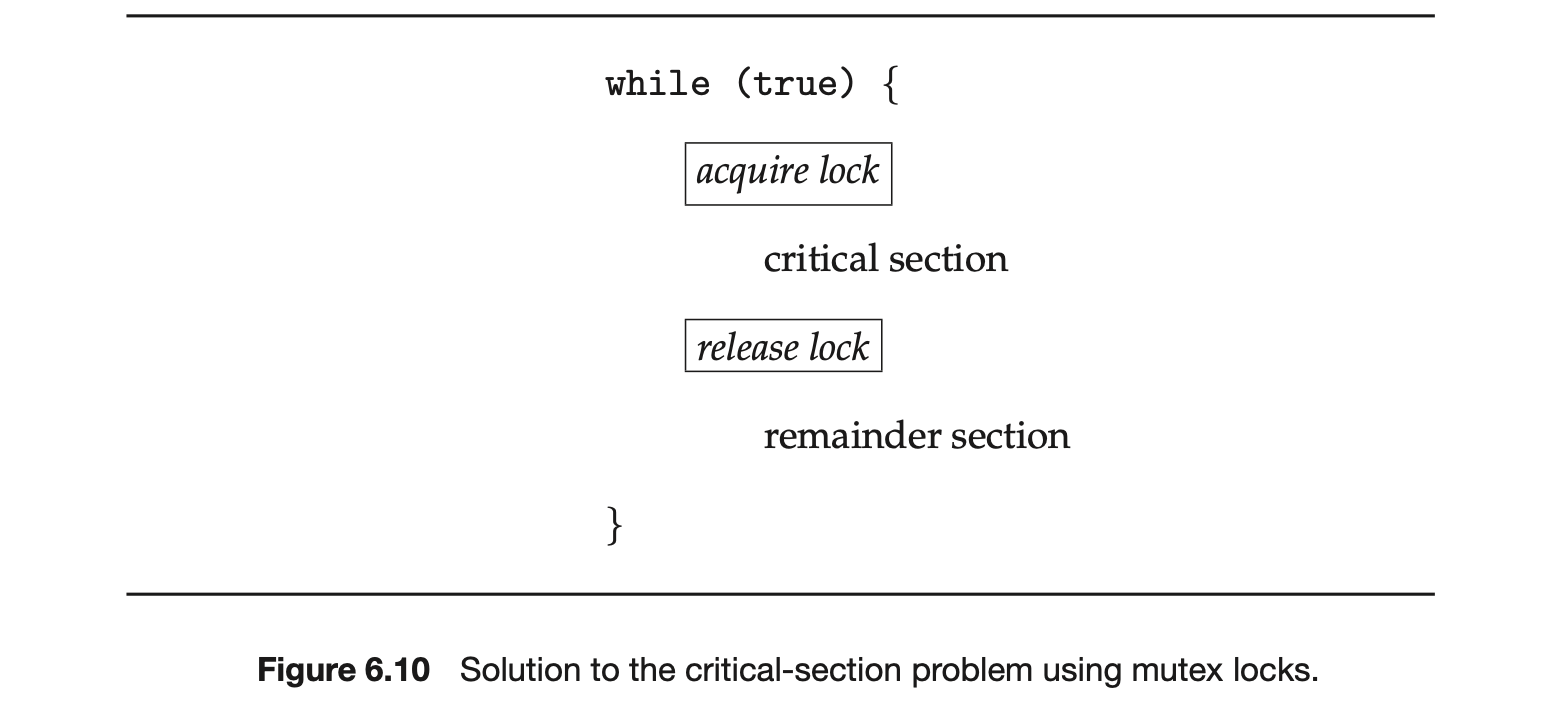
We begin our consideration of process synchronization by discussing the so-called critical-section problem. Consider a system consisting of processes . Each process has a segment of code, called a critical section, in which the process may be accessing -- and updating -- data that is shared with at least one other process. The important feature of the system is that, when one process is executing in its critical section, no other process is allowed to execute in its critical section. That is, no two processes are executing in their critical sections at the same time. The critical-section problem is to design a protocol that the processes can use to synchronize their activity so as to cooperatively share data. Each process must request permission to enter its critical section. The section of code implementing this request is the entry section. The critical section may be followed by an exit section. The remaining code is the remainder section. The general structure of a typical process is shown in Figure 1. The entry section and exit section are enclosed in boxes to highlight these important segments of code.
A solution to the critical-section problem must satisfy the following three requirements:
-
Mutual exclusion. If process is executing in its critical section, then no other processes can be executing in their critical sections.
-
Progress. If no process is executing in its critical section and some processes wish to enter their critical sections, then only those processes that are not executing in their remainder sections can participate in deciding which will enter its critical section next, and this selection cannot be postponed indefinitely.
-
Bounded waiting . There exists a bound, or limit, on the number of times that other processes are allowed to enter their critical sections after a process has made a request to enter its critical section and before that request is granted.
We assume that each process is executing at a nonzero speed. However, we can make no assumption concerning the relative speed of the processes.
At a given point in time, many kernel-mode processes may be active in the operating system. As a result, the code implementing an operating system (kernel code) is subject to several possible race conditions. Consider as an example a kernel data structure that maintains a list of all open files in the system. This list must be modified when a new file is opened or closed (adding the file to the list or removing it from the list). If two processes were to open files simultaneously, the separate updates to this list could result in a race condition.
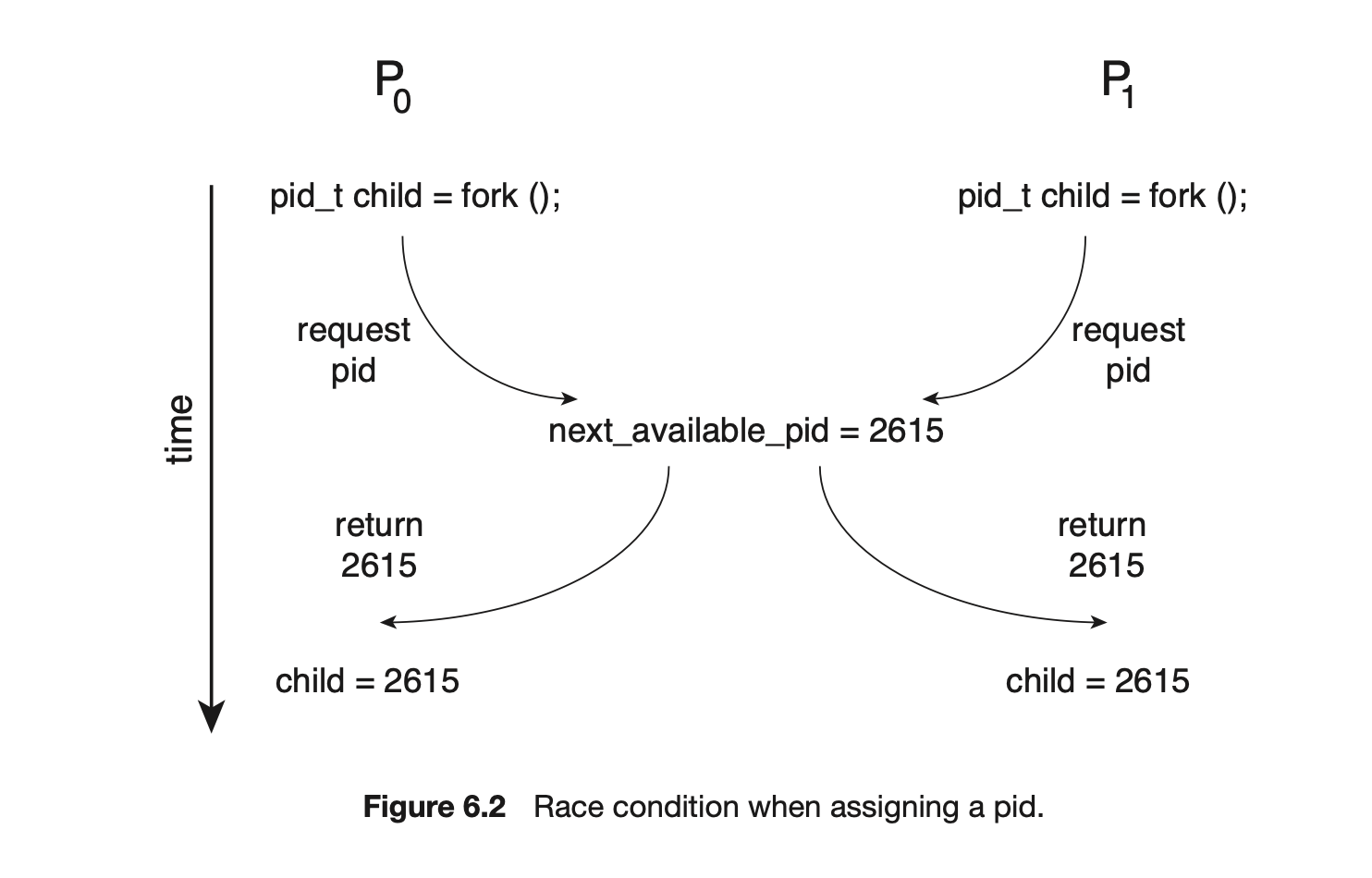
Another example is illustrated in Figure 6.2. In this situation, two processes, and , are creating child processes using the fork() system call. Recall from Section 3.3.1 that fork() returns the process identifier of the newly created process to the parent process. In this example, there is a race condition on the variable kernel variable next_available_pid which represents the value of the next available process identifier. Unless mutual exclusion is provided, it is possible the same process identifier number could be assigned to two separate processes.
Other kernel data structures that are prone to possible race conditions include structures for maintaining memory allocation, for maintaining process lists, and for interrupt handling. It is up to kernel developers to ensure that the operating system is free from such race conditions.
The critical-section problem could be solved simply in a single-core environment if we could prevent interrupts from occurring while a shared variable was being modified. In this way, we could be sure that the current sequence of instructions would be allowed to execute in order without preemption. No other instructions would be run, so no unexpected modifications could be made to the shared variable.
Unfortunately, this solution is not as feasible in a multiprocessor environment. Disabling interrupts on a multiprocessor can be time consuming, since the message is passed to all the processors. This message passing delays entry into each critical section, and system efficiency decreases. Also consider the effect on a system's clock if the clock is kept updated by interrupts.
Two general approaches are used to handle critical sections in operating systems: preemptive kernels and nonpreemptive kernels. A preemptive kernel allows a process to be preempted while it is running in kernel mode. A nonpreemptive kernel does not allow a process running in kernel mode to be preempted; a kernel-mode process will run until it exits kernel mode, blocks, or voluntarily yields control of the CPU.
Obviously, a nonpreemptive kernel is essentially free from race conditions on kernel data structures, as only one process is active in the kernel at a time. We cannot say the same about preemptive kernels, so they must be carefully designed to ensure that shared kernel data are free from race conditions. Preemptive kernels are especially difficult to design for SMP architectures, since in these environments it is possible for two kernel-mode processes to run simultaneously on different CPU cores.
Why, then, would anyone favor a preemptive kernel over a nonpreemptive one? A preemptive kernel may be more responsive, since there is less risk that a kernel-mode process will run for an arbitrarily long period before relinquishing the processor to waiting processes. (Of course, this risk can also be minimized by designing kernel code that does not behave in this way.) Furthermore, a preemptive kernel is more suitable for real-time programming, as it will allow a real-time process to preempt a process currently running in the kernel.
6.3 Peterson's Solution
Next, we illustrate a classic software-based solution to the critical-section problem known as Peterson's solution. Because of the way modern computer architectures perform basic machine-language instructions, such as load and store, there are no guarantees that Peterson's solution will work correctly on such architectures. However, we present the solution because it provides a good algorithmic description of solving the critical-section problem and illustrates some of the complexities involved in designing software that addresses the requirements of mutual exclusion, progress, and bounded waiting.
Peterson's solution is restricted to two processes that alternate execution between their critical sections and remainder sections. The processes are numbered and . For convenience, when presenting , we use to denote the other process; that is, equals .
Peterson's solution requires the two processes to share two data items:
int turn;
boolean flag[2];
The variable turn indicates whose turn it is to enter its critical section. That is, if turn == i, then process is allowed to execute in its critical section. The flag array is used to indicate if a process is ready to enter its critical section. For example, if flag[i] is true, is ready to enter its critical section. With an explanation of these data structures complete, we are now ready to describe the algorithm shown in Figure 6.3.
To enter the critical section, process first sets flag[i] to be true and then sets turn to the value j, thereby asserting that if the other process wishes to enter the critical section, it can do so. If both processes try to enter at the same time, turn will be set to both i and j at roughly the same time. Only one of these assignments will last; the other will occur but will be overwritten immediately. The eventual value of turn determines which of the two processes is allowed to enter its critical section first.
We now prove that this solution is correct. We need to show that:
- Mutual exclusion is preserved.
- The progress requirement is satisfied.
- The bounded-waiting requirement is met.
To prove property 1, we note that each enters its critical section only if either flag[j] == false or turn == i. Also note that, if both processes can be executing in their critical sections at the same time, then flag[0] == flag[1] == true. These two observations imply that and could not have successfully executed their while statements at about the same time, since the value of turn can be either 0 or 1 but cannot be both. Hence, one of the processes--say, --must have successfully executed the while statement, whereas had to execute at least one additional statement ("turn == j"). However, at that time, flag[j] == true and turn == j, and this condition will persist as long as is in its critical section; as a result, mutual exclusion is preserved.
To prove properties 2 and 3, we note that a process can be prevented from entering the critical section only if it is stuck in the while loop with the condition flag[j] == true and turn == j; this loop is the only one possible. If is not ready to enter the critical section, then flag[j] == false, and can enter its critical section. If has set flag[j] to true and is also executing in its while statement, then either turn == i or turn == j. If turn == i, then will enter the critical section. If turn == j, then will enter the critical section. However, once exits its critical section, it will reset flag[j] to false, allowing to enter its critical section. If resets flag[j] to true, it must also set turn to i. Thus, since does not change the value of the variable turn while executing the while statement, will enter the critical section (progress) after at most one entry by (bounded waiting).
As mentioned at the beginning of this section, Peterson's solution is not guaranteed to work on modern computer architectures for the primary reason that, to improve system performance, processors and/or compilers may reorder read and write operations that have no dependencies. For a single-threaded application, this reordering is immaterial as far as program correctness is concerned, as the final values are consistent with what is expected. (This is similar to balancing a checkbook--the actual order in which credit and debit operations are performed is unimportant, because the final balance will still be the same.) But for a multithreaded application with shared data, the reordering of instructions may render inconsistent or unexpected results.
As an example, consider the following data that are shared between two threads:

where Thread 1 performs the statements
 and Thread 2 performs
and Thread 2 performs
 The expected behavior is, of course, that Thread 1 outputs the value 100 for variable x. However, as there are no data dependencies between the variables flag and x, it is possible that a processor may reorder the instructions for Thread 2 so that flag is assigned true before assignment of x = 100. In this situation, it is possible that Thread 1 would output 0 for variable x. Less obvious is that the processor may also reorder the statements issued by Thread 1 and load the variable x before loading the value of flag. If this were to occur, Thread 1 would output 0 for variable x even if the instructions issued by Thread 2 were not reordered.
The expected behavior is, of course, that Thread 1 outputs the value 100 for variable x. However, as there are no data dependencies between the variables flag and x, it is possible that a processor may reorder the instructions for Thread 2 so that flag is assigned true before assignment of x = 100. In this situation, it is possible that Thread 1 would output 0 for variable x. Less obvious is that the processor may also reorder the statements issued by Thread 1 and load the variable x before loading the value of flag. If this were to occur, Thread 1 would output 0 for variable x even if the instructions issued by Thread 2 were not reordered.
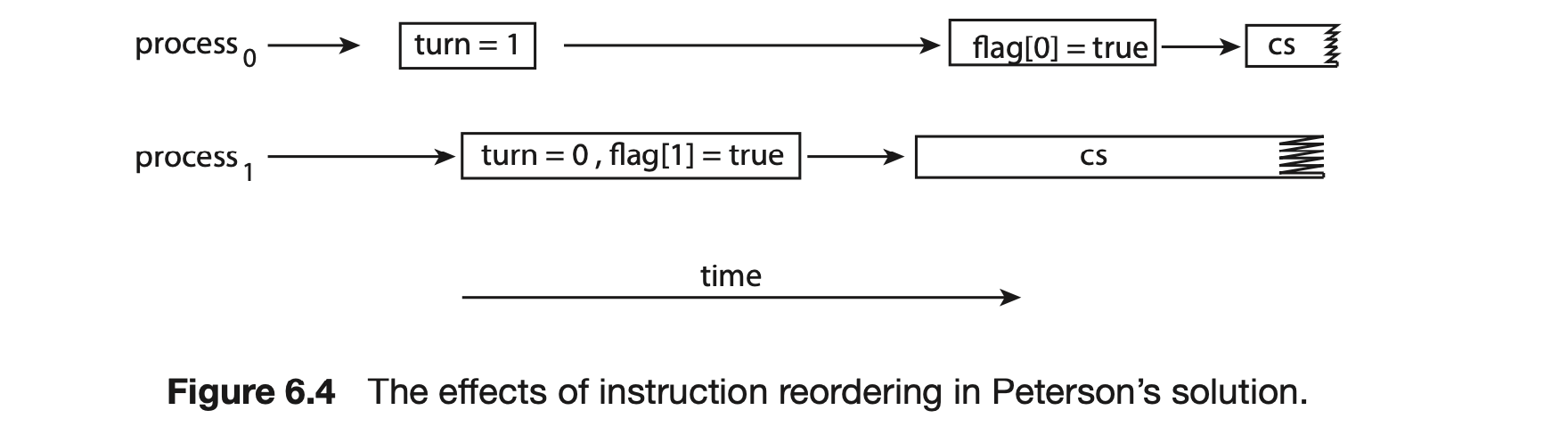
How does this affect Peterson's solution? Consider what happens if the assignments of the first two statements that appear in the entry section of Peterson's solution in Figure 6.3 are reordered; it is possible that both threads may be active in their critical sections at the same time, as shown in Figure 6.4.
As you will see in the following sections, the only way to preserve mutual exclusion is by using proper synchronization tools. Our discussion of these tools begins with primitive support in hardware and proceeds through abstract, high-level, software-based APIs available to both kernel developers and application programmers.
6.4 Hardware Support for Synchronization
We have just described one software-based solution to the critical-section problem. (We refer to it as a software-based solution because the algorithm involves no special support from the operating system or specific hardware instructions to ensure mutual exclusion.) However, as discussed, software-based solutions are not guaranteed to work on modern computer architectures. In this section, we present three hardware instructions that provide support for solving the critical-section problem. These primitive operations can be used directly as synchronization tools, or they can be used to form the foundation of more abstract synchronization mechanisms.
6.4.1 Memory Barriers
In Section 6.3, we saw that a system may reorder instructions, a policy that can lead to unreliable data states. How a computer architecture determines what memory guarantees it will provide to an application program is known as its memory model. In general, a memory model falls into one of two categories:
- Strongly ordered, where a memory modification on one processor is immediately visible to all other processors.
- Weakly ordered, where modifications to memory on one processor may not be immediately visible to other processors.
Memory models vary by processor type, so kernel developers cannot make any assumptions regarding the visibility of modifications to memory on a shared-memory multiprocessor. To address this issue, computer architectures provide instructions that can force any changes in memory to be propagated to all other processors, thereby ensuring that memory modifications are visible to threads running on other processors. Such instructions are known as memory barriers or memory fences. When a memory barrier instruction is performed, the system ensures that all loads and stores are completed before any subsequent load or store operations are performed. Therefore, even if instructions were reordered, the memory barrier ensures that the store operations are completed in memory and visible to other processors before future load or store operations are performed.
Let's return to our most recent example, in which reordering of instructions could have resulted in the wrong output, and use a memory barrier to ensure that we obtain the expected output.
If we add a memory barrier operation to Thread 1

we guarantee that the value of flag is loaded before the value of x.
Similarly, if we place a memory barrier between the assignments performed by Thread 2
 we ensure that the assignment to x occurs before the assignment to flag.
With respect to Peterson's solution, we could place a memory barrier between the first two assignment statements in the entry section to avoid the reordering of operations shown in Figure 6.4. Note that memory barriers are considered very low-level operations and are typically only used by kernel developers when writing specialized code that ensures mutual exclusion.
we ensure that the assignment to x occurs before the assignment to flag.
With respect to Peterson's solution, we could place a memory barrier between the first two assignment statements in the entry section to avoid the reordering of operations shown in Figure 6.4. Note that memory barriers are considered very low-level operations and are typically only used by kernel developers when writing specialized code that ensures mutual exclusion.
6.4.2 Hardware Instructions
Many modern computer systems provide special hardware instructions that allow us either to test and modify the content of a word or to swap the contents of two words atomically--that is, as one uninterruptible unit. We can use these special instructions to solve the critical-section problem in a relatively simple manner. Rather than discussing one specific instruction for one specific machine, we abstract the main concepts behind these types of instructions by describing the test_and_set() and compare_and_swap() instructions.
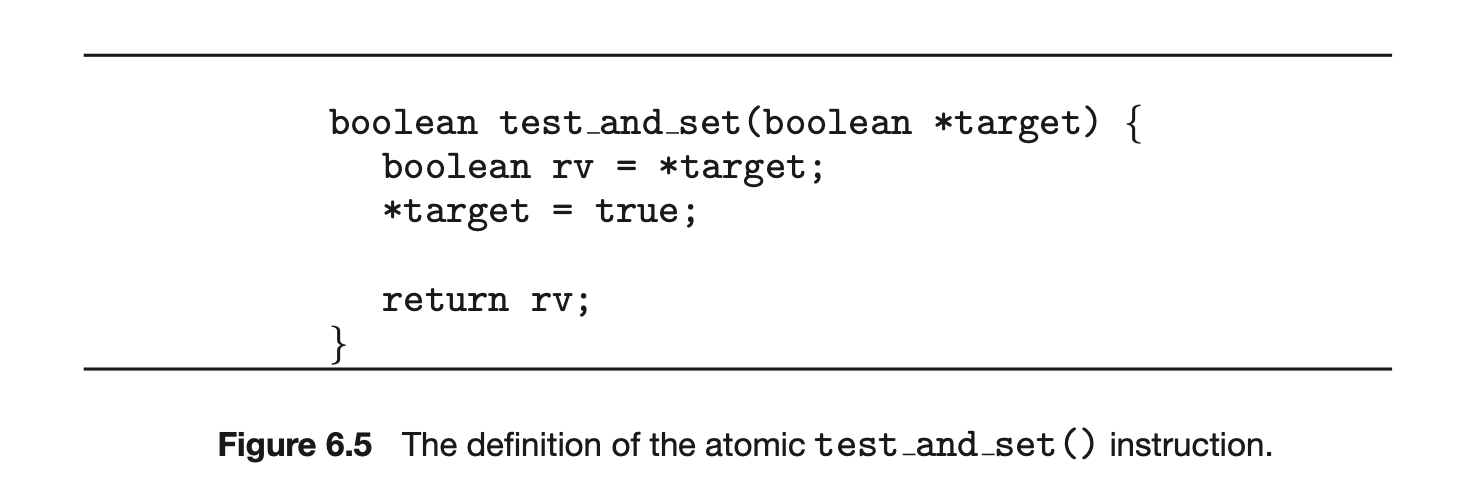
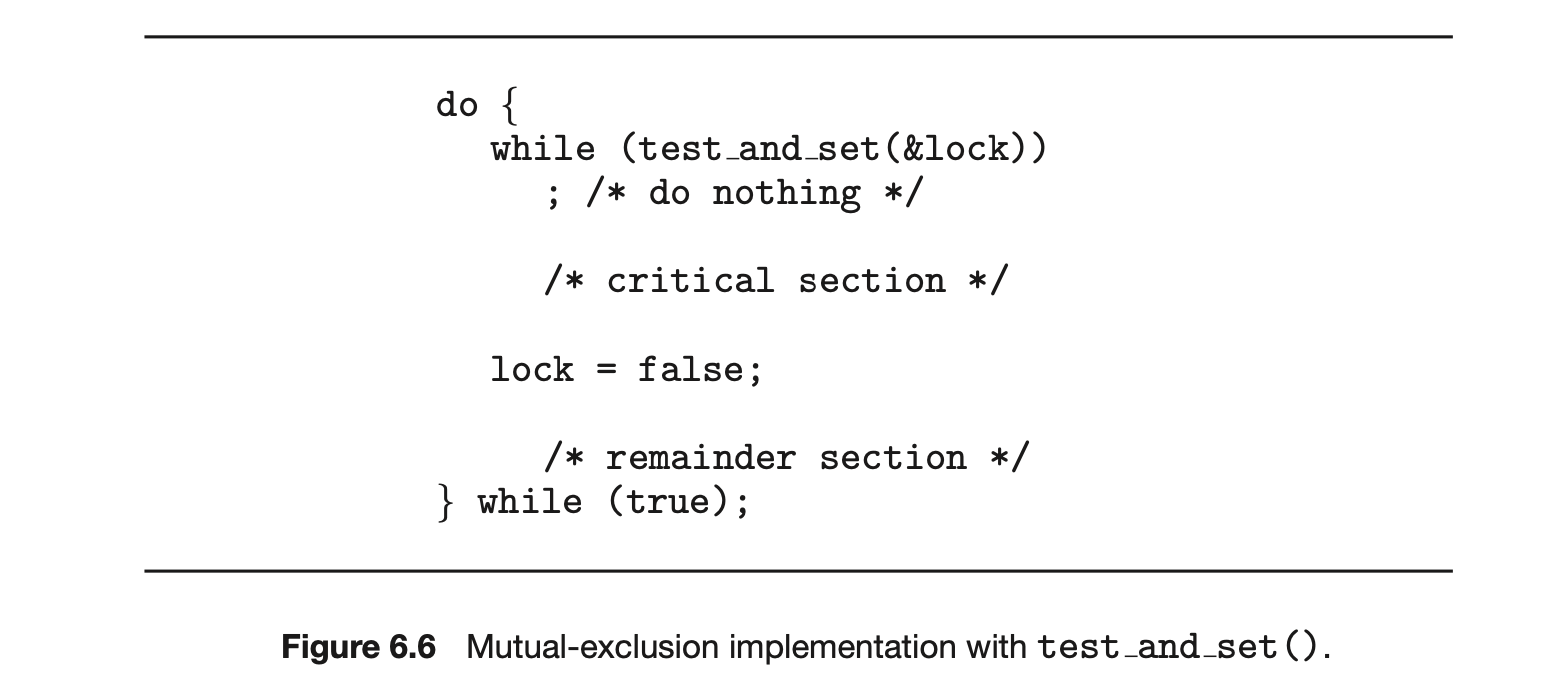
The test_and_set() instruction can be defined as shown in Figure 6.5. The important characteristic of this instruction is that it is executed atomically. Thus, if two test_and_set() instructions are executed simultaneously (each on a different core), they will be executed sequentially in some arbitrary order. If the machine supports the test_and_set() instruction, then we can implement mutual exclusion by declaring a boolean variable lock, initialized to false. The structure of process is shown in Figure 6.6.
The compare_and_swap() instruction (CAS), just like the test_and_set() instruction, operates on two words atomically, but uses a different mechanism that is based on swapping the content of two words.
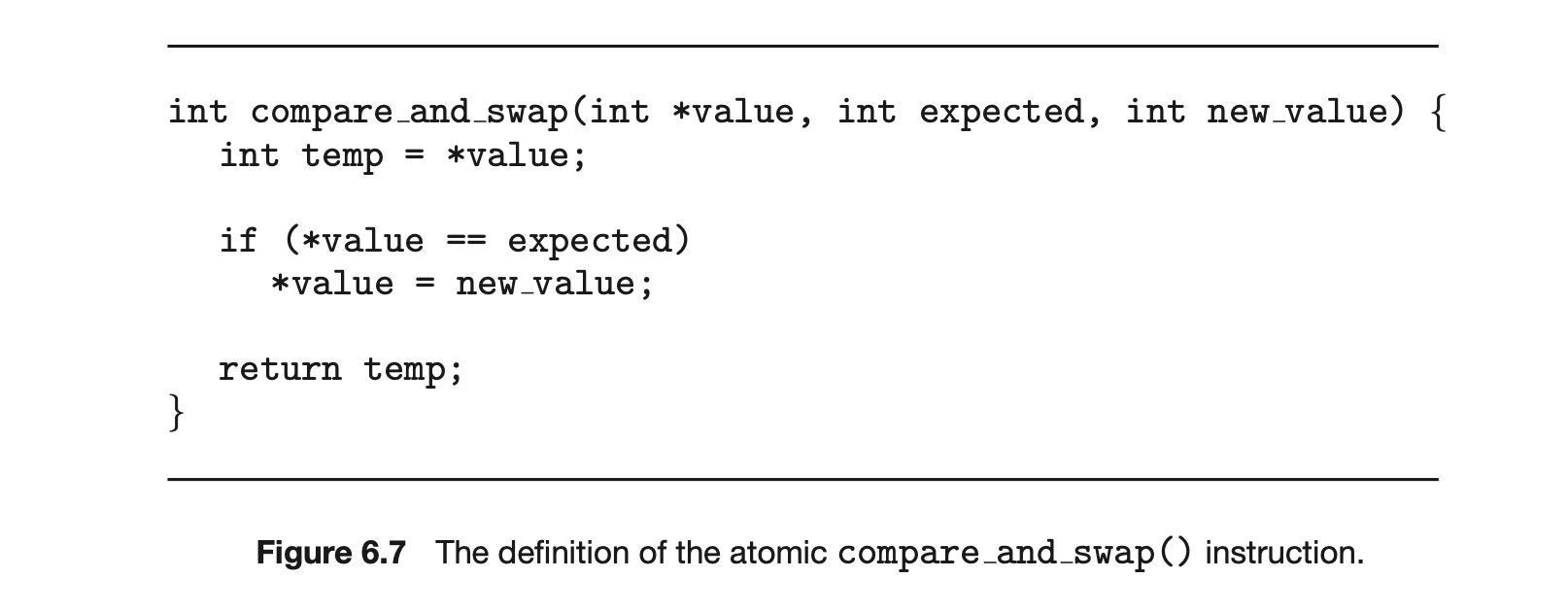
The CAS instruction operates on three operands and is defined in Figure 6.7. The operand value is set to new_value only if the expression (*value == expected) is true. Regardless, CAS always returns the original value of the variable value. The important characteristic of this instruction is that it is executed atomically. Thus, if two CAS instructions are executed simultaneously (each on a different core), they will be executed sequentially in some arbitrary order.
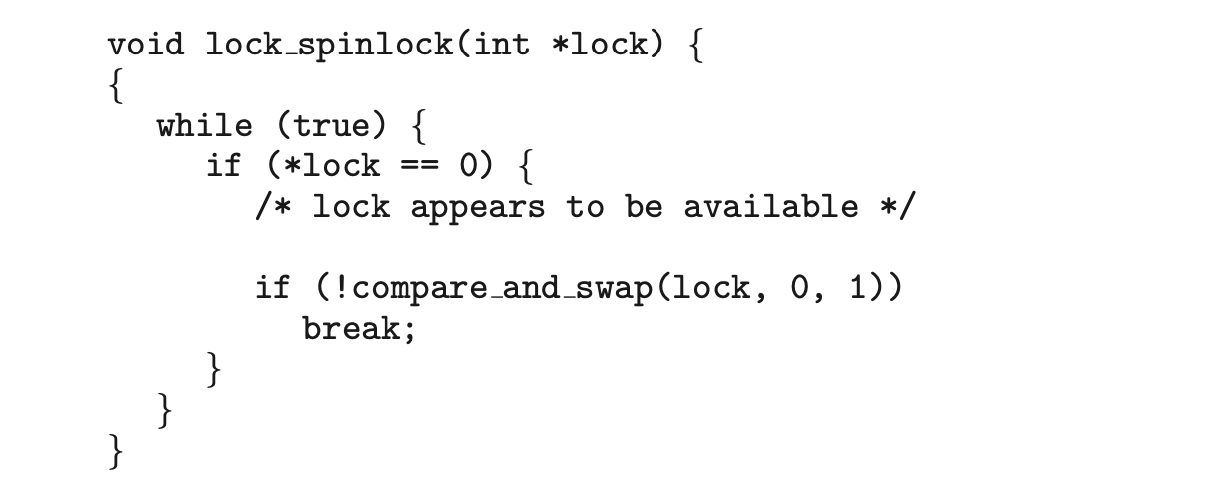
Mutual exclusion using CAS can be provided as follows: A global variable (lock) is declared and is initialized to 0. The first process that invokes compare_and_swap() will set lock to 1. It will then enter its critical section,
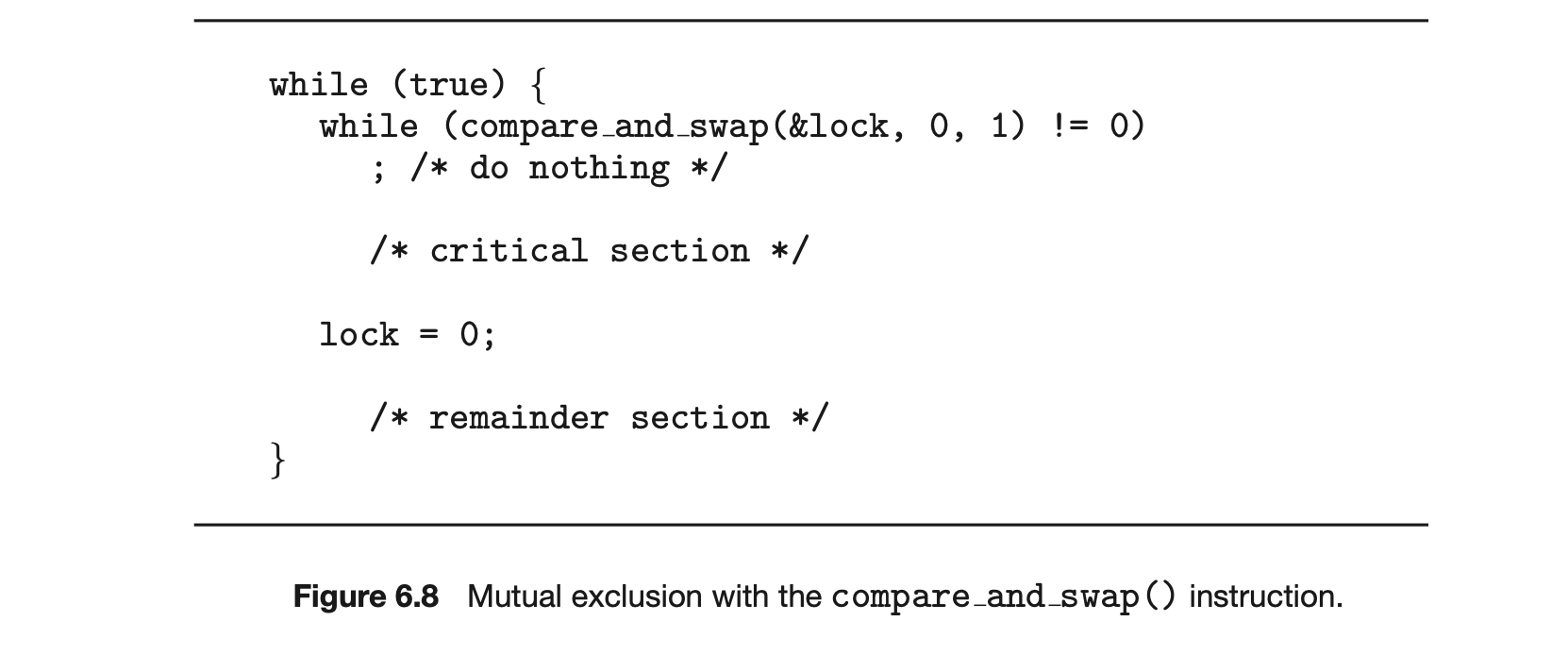
because the original value of lock was equal to the expected value of 0. Subsequent calls to compare_and_swap() will not succeed, because lock now is not equal to the expected value of 0. When a process exits its critical section, it sets lock back to 0, which allows another process to enter its critical section. The structure of process is shown in Figure 6.8.
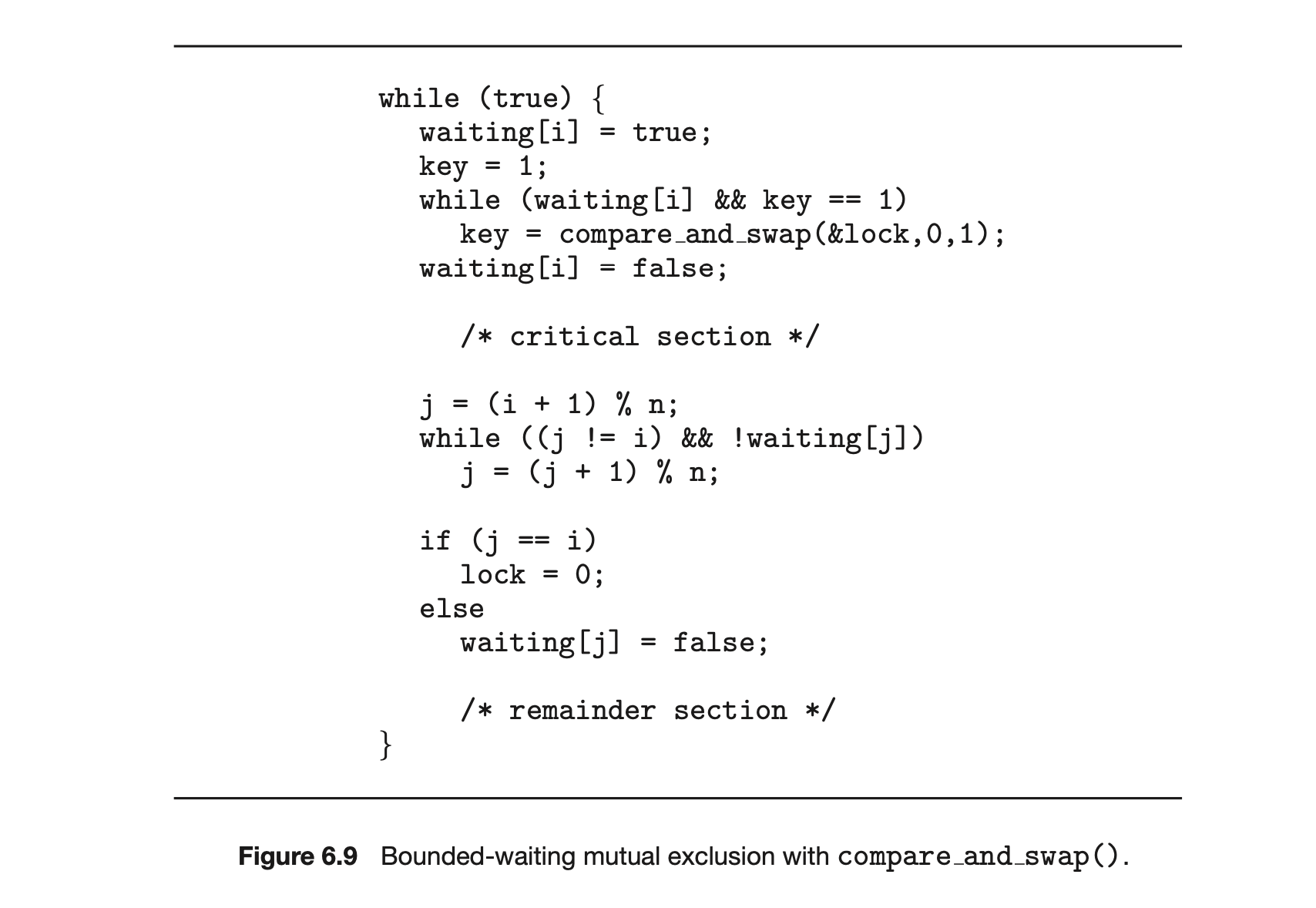
Although this algorithm satisfies the mutual-exclusion requirement, it does not satisfy the bounded-waiting requirement. In Figure 6.9, we present
MAKING COMPARE-AND-SWAP ATOMIC
On Intel x86 architectures, the assembly language statement cmpxchg is used to implement the compare and swap() instruction. To enforce atomic execution, the lock prefix is used to lock the bus while the destination operand is being updated. The general form of this instruction appears as:
lock cmpxchg <destination operand>, <source operand>
another algorithm using the compare_and_swap() instruction that satisfies all the critical-section requirements. The common data structures are

The elements in the waiting array are initialized to false, and lock is initialized to 0. To prove that the mutual-exclusion requirement is met, we note that process can enter its critical section only if either waiting[i] == false or key == 0. The value of key can become 0 only if the compare_and_swap() is executed. The first process to execute the compare_and_swap() will find key == 0; all others must wait. The variable waiting[i] can become false only if another process leaves its critical section; only one waiting[i] is set to false, maintaining the mutual-exclusion requirement.
To prove that the progress requirement is met, we note that the arguments presented for mutual exclusion also apply here, since a process exiting the critical section either sets lock to 0 or sets waiting[j] to false. Both allow a process that is waiting to enter its critical section to proceed.
To prove that the bounded-waiting requirement is met, we note that, when a process leaves its critical section, it scans the array waiting in the cyclic ordering (, ,..., , ,..., ). It designates the first process in this ordering that is in the entry section (waiting[j] == true) as the next one to enter the critical section. Any process waiting to enter its critical section will thus do so within turns.
Details describing the implementation of the atomic test_and_set() and compare_and_swap() instructions are discussed more fully in books on computer architecture.
6.4.3 Atomic Variables
Typically, the compare_and_swap() instruction is not used directly to provide mutual exclusion. Rather, it is used as a basic building block for constructing other tools that solve the critical-section problem. One such tool is an atomic variable, which provides atomic operations on basic data types such as integers and booleans. We know from Section 6.1 that incrementing or decrementing an integer value may produce a race condition. Atomic variables can be used in to ensure mutual exclusion in situations where there may be a data race on a single variable while it is being updated, as when a counter is incremented.
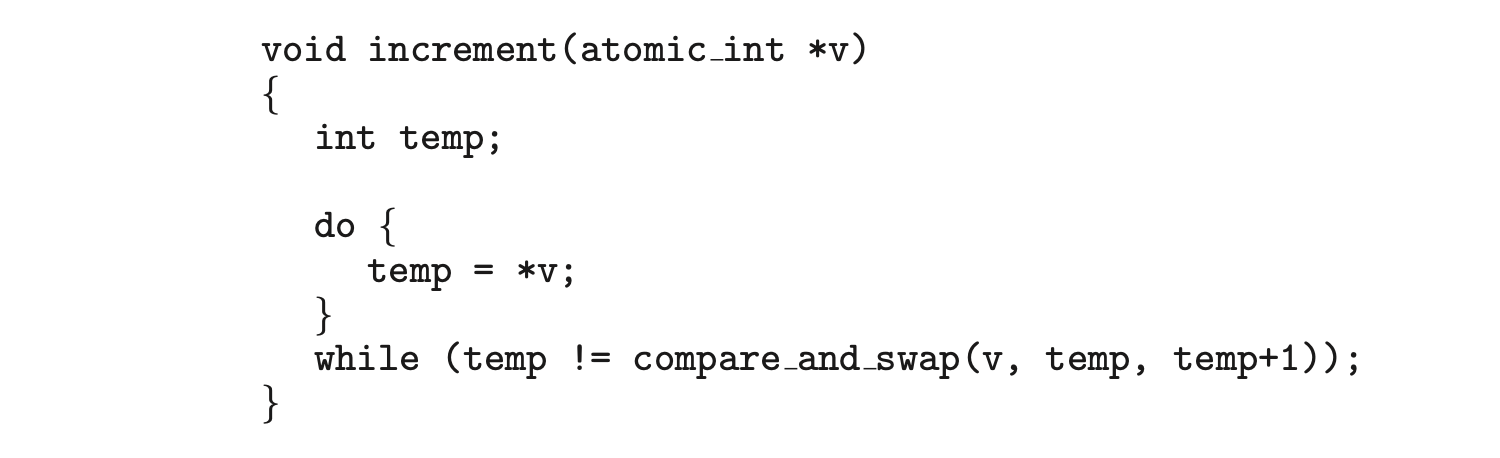
Most systems that support atomic variables provide special atomic data types as well as functions for accessing and manipulating atomic variables. These functions are often implemented using compare_and_swap() operations. As an example, the following increments the atomic integer sequence:
 where the
where the increment() function is implemented using the CAS instruction:
 It is important to note that although atomic variables provide atomic updates, they do not entirely solve race conditions in all circumstances. For example, in the bounded-buffer problem described in Section 6.1, we could use an atomic integer for count. This would ensure that the updates to count were atomic. However, the producer and consumer processes also have while loops whose condition depends on the value of count. Consider a situation in which the buffer is currently empty and two consumers are looping while waiting for count > 0. If a producer entered one item in the buffer, both consumers could exit their while loops (as count would no longer be equal to 0) and proceed to consume, even though the value of count was only set to 1.
It is important to note that although atomic variables provide atomic updates, they do not entirely solve race conditions in all circumstances. For example, in the bounded-buffer problem described in Section 6.1, we could use an atomic integer for count. This would ensure that the updates to count were atomic. However, the producer and consumer processes also have while loops whose condition depends on the value of count. Consider a situation in which the buffer is currently empty and two consumers are looping while waiting for count > 0. If a producer entered one item in the buffer, both consumers could exit their while loops (as count would no longer be equal to 0) and proceed to consume, even though the value of count was only set to 1.
Atomic variables are commonly used in operating systems as well as concurrent applications, although their use is often limited to single updates of shared data such as counters and sequence generators. In the following sections, we explore more robust tools that address race conditions in more generalized situations.
6.5 Mutex Locks
The hardware-based solutions to the critical-section problem presented in Section 6.4 are complicated as well as generally inaccessible to application programmers. Instead, operating-system designers build higher-level software tools to solve the critical-section problem. The simplest of these tools is the mutex lock. (In fact, the term mutex is short for mutual exclusion.) We use the mutex lock to protect critical sections and thus prevent race conditions. That is, a process must acquire the lock before entering a critical section; it releases the lock when it exits the critical section. The acquire() function acquires the lock, and the release() function releases the lock, as illustrated in Figure 6.10.
A mutex lock has a boolean variable available whose value indicates if the lock is available or not. If the lock is available, a call to acquire() succeeds, and the lock is then considered unavailable. A process that attempts to acquire an unavailable lock is blocked until the lock is released.
The definition of acquire() is as follows:

The definition of release() is as follows:
 Calls to either acquire() or release() must be performed atomically. Thus, mutex locks can be implemented using the CAS operation described in Section 6.4, and we leave the description of this technique as an exercise.
Calls to either acquire() or release() must be performed atomically. Thus, mutex locks can be implemented using the CAS operation described in Section 6.4, and we leave the description of this technique as an exercise.
Lock Contention
Locks are either contended or uncontended. A lock is considered contended if a thread blocks while trying to acquire the lock. If a lock is available when a thread attempts to acquire it, the lock is considered uncontended. Contended locks can experience either high contention (a relatively large number of threads attempting to acquire the lock) or low contention (a relatively small number of threads attempting to acquire the lock.) Unsurprisingly, highly contended locks tend to decrease overall performance of concurrent applications.
What is meant by "short duration"?
Spinlocks are often identified as the locking mechanism of choice on multiprocessor systems when the lock is to be held for a short duration. But what exactly constitutes a short duration? Given that waiting on a lock requires two context switches--a context switch to move the thread to the waiting state and a second context switch to restore the waiting thread once the lock becomes available--the general rule is to use a spinlock if the lock will be held for a duration of less than two context switches.
The main disadvantage of the implementation given here is that it requires busy waiting. While a process is in its critical section, any other process that tries to enter its critical section must loop continuously in the call to acquire(). This continual looping is clearly a problem in a real multiprogramming system, where a single CPU core is shared among many processes. Busy waiting also wastes CPU cycles that some other process might be able to use productively. (In Section 6.6, we examine a strategy that avoids busy waiting by temporarily putting the waiting process to sleep and then awakening it once the lock becomes available.)
The type of mutex lock we have been describing is also called a spinlock because the process "spins" while waiting for the lock to become available. (We see the same issue with the code examples illustrating the compare_and_swap() instruction.) Spinlocks do have an advantage, however, in that no context switch is required when a process must wait on a lock, and a context switch may take considerable time. In certain circumstances on multi-core systems, spinlocks are in fact the preferable choice for locking. If a lock is to be held for a short duration, one thread can "spin" on one processing core while another thread performs its critical section on another core. On modern multicore computing systems, spinlocks are widely used in many operating systems.
In Chapter 7 we examine how mutex locks can be used to solve classical synchronization problems. We also discuss how mutex locks and spinlocks are used in several operating systems, as well as in Pthreads.
6.6 Semaphores
Mutex locks, as we mentioned earlier, are generally considered the simplest of synchronization tools. In this section, we examine a more robust tool that can behave similarly to a mutex lock but can also provide more sophisticated ways for processes to synchronize their activities.
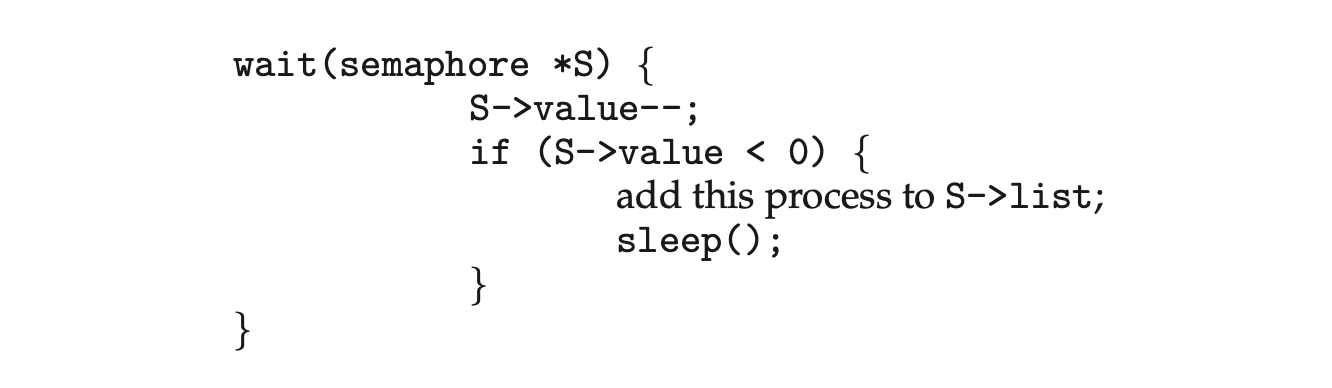
A semaphore S is an integer variable that, apart from initialization, is accessed only through two standard atomic operations: wait() and signal(). Semaphores were introduced by the Dutch computer scientist Edsger Dijkstra, and such, the wait() operation was originally termed P (from the Dutch_proberen_, "to test"); signal() was originally called V (from verhogen, "to increment"). The definition of wait() is as follows:

The definition of signal() is as follows:
 All modifications to the integer value of the semaphore in the wait() and signal() operations must be executed atomically. That is, when one process modifies the semaphore value, no other process can simultaneously modify that same semaphore value. In addition, in the case of wait(S), the testing of the integer value of S (S 0), as well as its possible modification (S--), must be executed without interruption. We shall see how these operations can be implemented in Section 6.6.2. First, let's see how semaphores can be used.
All modifications to the integer value of the semaphore in the wait() and signal() operations must be executed atomically. That is, when one process modifies the semaphore value, no other process can simultaneously modify that same semaphore value. In addition, in the case of wait(S), the testing of the integer value of S (S 0), as well as its possible modification (S--), must be executed without interruption. We shall see how these operations can be implemented in Section 6.6.2. First, let's see how semaphores can be used.
6.6.1 Semaphore Usage
Operating systems often distinguish between counting and binary semaphores. The value of a counting semaphore can range over an unrestricted domain. The value of a binary semaphore can range only between 0 and 1. Thus, binary semaphores behave similarly to mutex locks. In fact, on systems that do not provide mutex locks, binary semaphores can be used instead for providing mutual exclusion.
Counting semaphores can be used to control access to a given resource consisting of a finite number of instances. The semaphore is initialized to the number of resources available. Each process that wishes to use a resource performs a wait() operation on the semaphore (thereby decrementing the count). When a process releases a resource, it performs a signal() operation (incrementing the count). When the count for the semaphore goes to 0, all resources are being used. After that, processes that wish to use a resource will block until the count becomes greater than 0.
We can also use semaphores to solve various synchronization problems. For example, consider two concurrently running processes: with a statement and with a statement . Suppose we require that be executed only after has completed. We can implement this scheme readily by letting and share a common semaphore synch, initialized to 0. In process , we insert the statements

In process , we insert the statements
 Because synch is initialized to 0, will execute only after has invoked signal(synch), which is after statement has been executed.
Because synch is initialized to 0, will execute only after has invoked signal(synch), which is after statement has been executed.
6.6.2 Semaphore Implementation
Recall that the implementation of mutex locks discussed in Section 6.5 suffers from busy waiting. The definitions of the wait() and signal() semaphore operations just described present the same problem. To overcome this problem, we can modify the definition of the wait() and signal() operations as follows: When a process executes the wait() operation and finds that the semaphore value is not positive, it must wait. However, rather than engaging in busy waiting, the process can suspend itself. The suspend operation places a process into a waiting queue associated with the semaphore, and the state of the process is switched to the waiting state. Then control is transferred to the CPU scheduler, which selects another process to execute.
A process that is suspended, waiting on a semaphore S, should be restarted when some other process executes a signal() operation. The process is restarted by a wakeup() operation, which changes the process from the waiting state to the ready state. The process is then placed in the ready queue. (The CPU may or may not be switched from the running process to the newly ready process, depending on the CPU-scheduling algorithm.)
To implement semaphores under this definition, we define a semaphore as follows:

Each semaphore has an integer value and a list of processes list. When a process must wait on a semaphore, it is added to the list of processes. A signal() operation removes one process from the list of waiting processes and awakens that process.
Now, the wait() semaphore operation can be defined as
and the signal() semaphore operation can be defined as
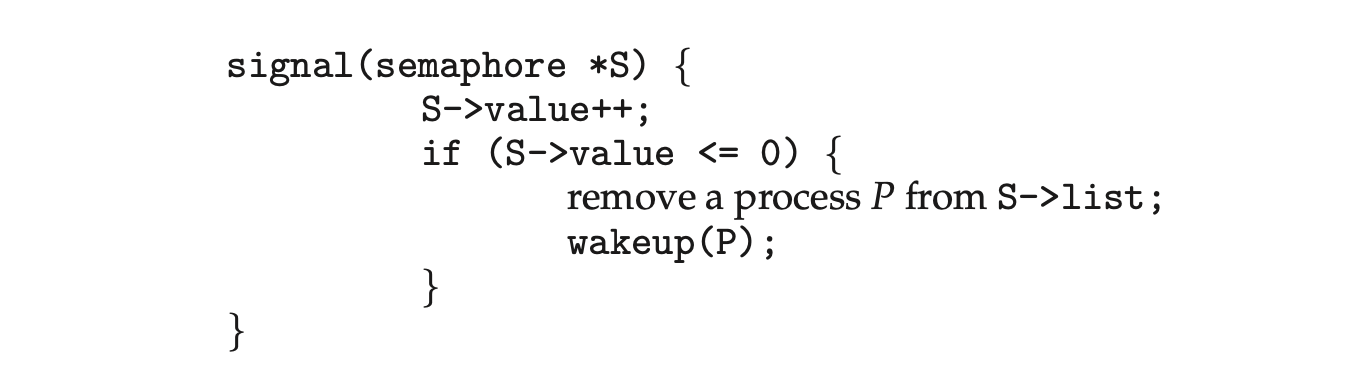 The sleep() operation suspends the process that invokes it. The wakeup(P) operation resumes the execution of a suspended process P. These two operations are provided by the operating system as basic system calls.
The sleep() operation suspends the process that invokes it. The wakeup(P) operation resumes the execution of a suspended process P. These two operations are provided by the operating system as basic system calls.
Note that in this implementation, semaphore values may be negative, whereas semaphore values are never negative under the classical definition of semaphores with busy waiting. If a semaphore value is negative, its magnitude is the number of processes waiting on that semaphore. This fact results from switching the order of the decrement and the test in the implementation of the wait() operation.
The list of waiting processes can be easily implemented by a link field in each process control block (PCB). Each semaphore contains an integer value and a pointer to a list of PCBs. One way to add and remove processes from the list so as to ensure bounded waiting is to use a FIFO queue, where the semaphore contains both head and tail pointers to the queue. In general, however, the list can use any queuing strategy. Correct usage of semaphores does not depend on a particular queuing strategy for the semaphore lists.
As mentioned, it is critical that semaphore operations be executed atomically. We must guarantee that no two processes can execute wait() and signal() operations on the same semaphore at the same time. This is a critical-section problem, and in a single-processor environment, we can solve it by simply inhibiting interrupts during the time the wait() and signal() operations are executing. This scheme works in a single-processor environment because, once interrupts are inhibited, instructions from different processes cannot be interleaved. Only the currently running process executes until interrupts are reenabled and the scheduler can regain control.
In a multicore environment, interrupts must be disabled on every processing core. Otherwise, instructions from different processes (running on different cores) may be interleaved in some arbitrary way. Disabling interrupts on every core can be a difficult task and can seriously diminish performance. Therefore, SMP systems must provide alternative techniques--such as compare_and_swap() or spinlocks--to ensure that wait() and signal() are performed atomically.
It is important to admit that we have not completely eliminated busy waiting with this definition of the wait() and signal() operations. Rather, we have moved busy waiting from the entry section to the critical sections of application programs. Furthermore, we have limited busy waiting to the critical sections of the wait() and signal() operations, and these sections are short (if properly coded, they should be no more than about ten instructions). Thus, the critical section is almost never occupied, and busy waiting occursrately, and then for only a short time. An entirely different situation exists with application programs whose critical sections may be long (minutes or even hours) or may almost always be occupied. In such cases, busy waiting is extremely inefficient.
6.7 Monitors
Although semaphores provide a convenient and effective mechanism for process synchronization, using them incorrectly can result in timing errors that are difficult to detect, since these errors happen only if particular execution sequences take place, and these sequences do not always occur.
We have seen an example of such errors in the use of a count in our solution to the producer-consumer problem (Section 6.1). In that example, the timing problem happened only rarely, and even then the count value appeared to be reasonable--off by only 1. Nevertheless, the solution is obviously not an acceptable one. It is for this reason that mutex locks and semaphores were introduced in the first place.
Unfortunately, such timing errors can still occur when either mutex locks or semaphores are used. To illustrate how, we review the semaphore solution to the critical-section problem. All processes share a binary semaphore variable mutex, which is initialized to 1. Each process must execute wait(mutex) before entering the critical section and signal(mutex) afterward. If this sequence is not observed, two processes may be in their critical sections simultaneously. Next, we list several difficulties that may result. Note that these difficulties will arise even if a single process is not well behaved. This situation may be caused by an honest programming error or an uncooperative programmer.
- Suppose that a program interchanges the order in which the wait() and signal() operations on the semaphore mutex are executed, resulting in the following execution:
 In this situation, several processes may be executing in their critical sections simultaneously, violating the mutual-exclusion requirement. This error may be discovered only if several processes are simultaneously active in their critical sections. Note that this situation may not always be reproducible.
In this situation, several processes may be executing in their critical sections simultaneously, violating the mutual-exclusion requirement. This error may be discovered only if several processes are simultaneously active in their critical sections. Note that this situation may not always be reproducible. - Suppose that a program replaces signal(mutex) with wait(mutex). That is, it executes
 In this case, the process will permanently block on the second call to wait(), as the semaphore is now unavailable.
In this case, the process will permanently block on the second call to wait(), as the semaphore is now unavailable. - Suppose that a process omits the wait(mutex), or the signal(mutex), or both. In this case, either mutual exclusion is violated or the process will permanently block.
These examples illustrate that various types of errors can be generated easily when programmers use semaphores or mutex locks incorrectly to solve the critical-section problem. One strategy for dealing with such errors is to incorporate simple synchronization tools as high-level language constructs. In this section, we describe one fundamental high-level synchronization construct--the monitor type.
6.7.1 Monitor Usage
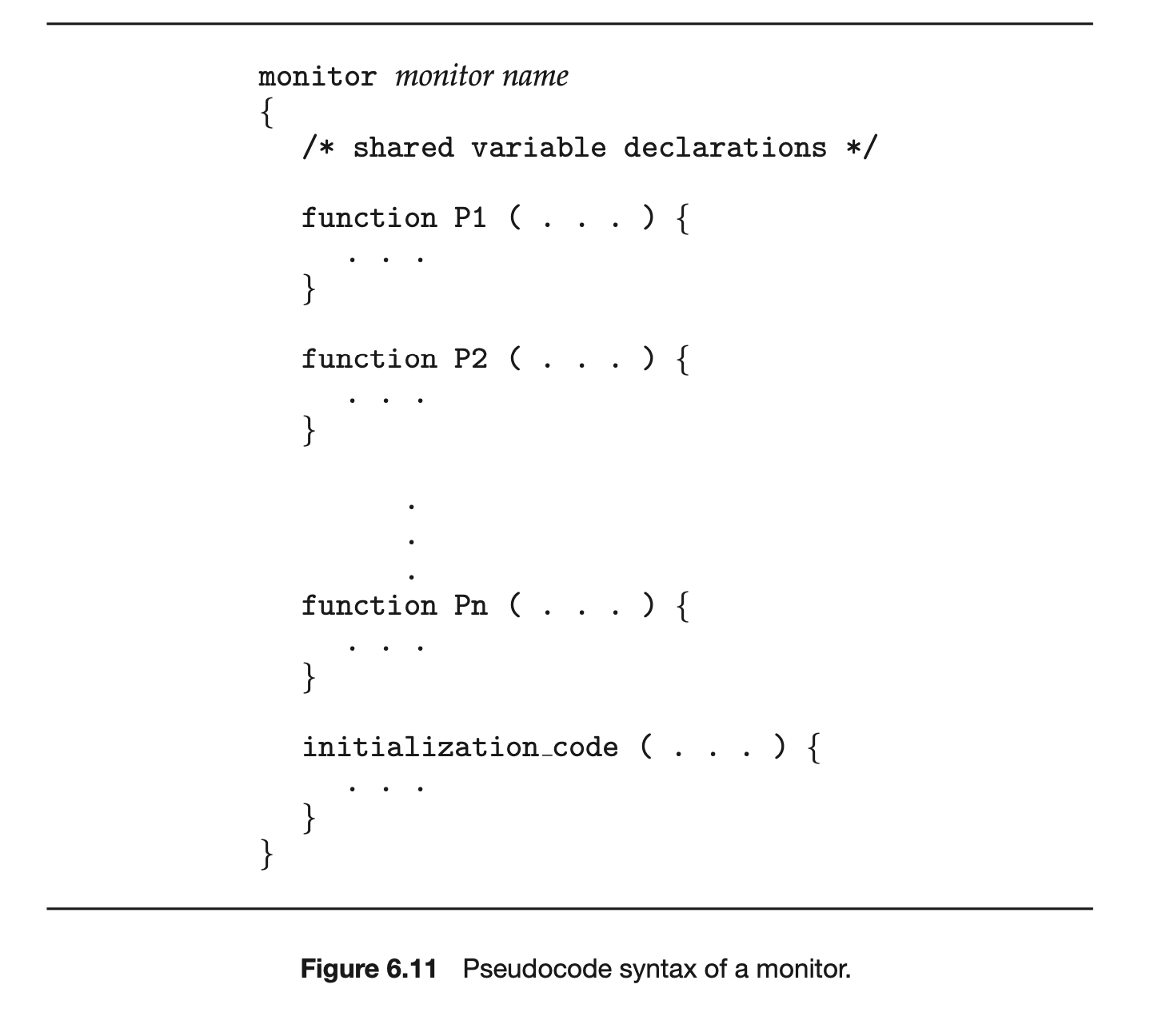
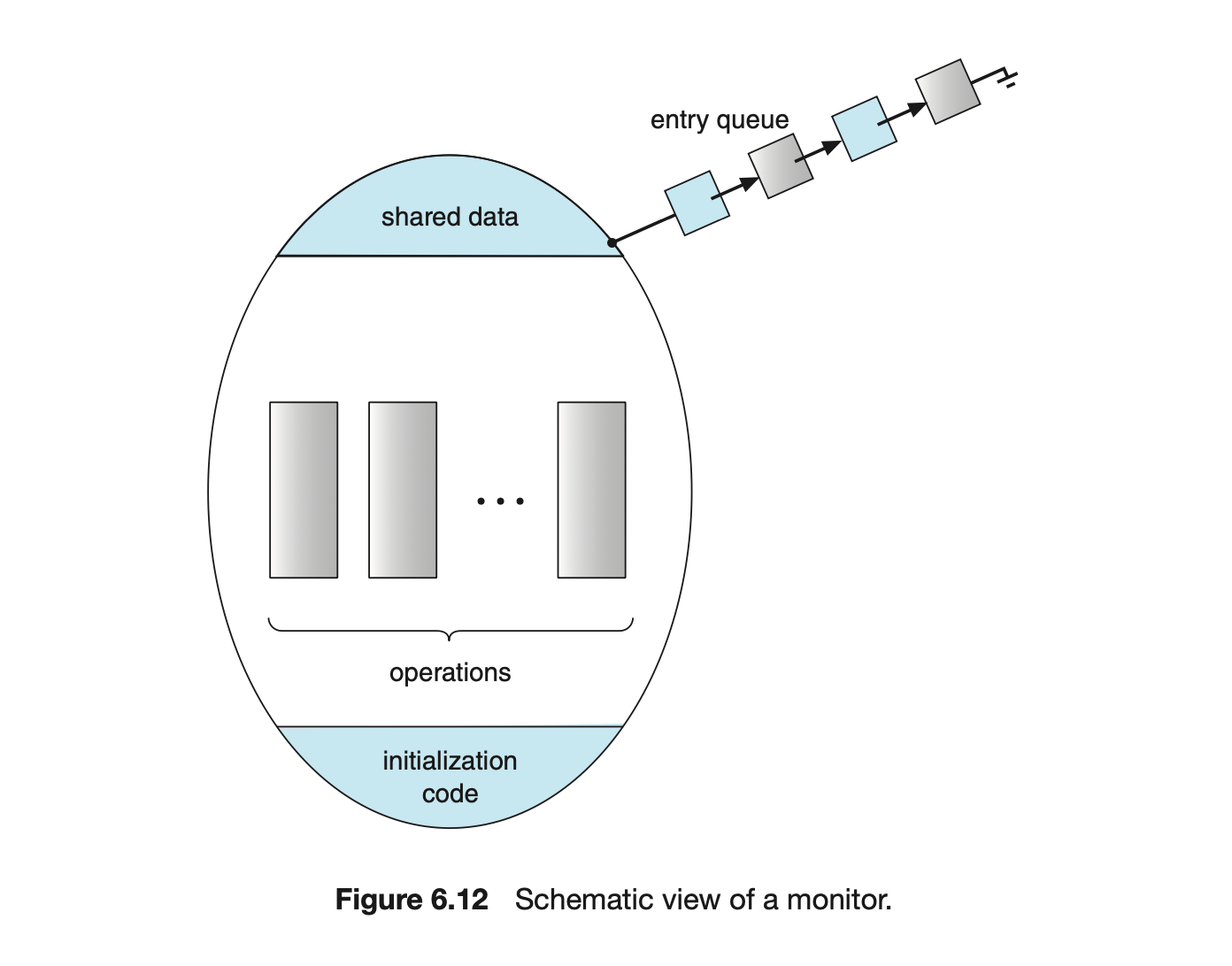
An abstract data type --or ADT--encapsulates data with a set of functions to operate on that data that are independent of any specific implementation of the ADT. A monitor type is an ADT that includes a set of programmer-defined operations that are provided with mutual exclusion within the monitor. The monitor type also declares the variables whose values define the state of an instance of that type, along with the bodies of functions that operate on those variables. The syntax of a monitor type is shown in Figure 6.11. The representation of a monitor type cannot be used directly by the various processes. Thus, a function defined within a monitor can access only those variables declared locally within the monitor and its formal parameters. Similarly, the local variables of a monitor can be accessed by only the local functions.
 The monitor construct ensures that only one process at a time is active within the monitor. Consequently, the programmer does not need to code this synchronization constraint explicitly (Figure 6.12). However, the monitor construct, as defined so far, is not sufficiently powerful for modeling some synchronization schemes. For this purpose, we need to define additional synchronization mechanisms. These mechanisms are provided by the condition construct. A programmer who needs to write a tailor-made synchronization scheme can define one or more variables of type condition:
The monitor construct ensures that only one process at a time is active within the monitor. Consequently, the programmer does not need to code this synchronization constraint explicitly (Figure 6.12). However, the monitor construct, as defined so far, is not sufficiently powerful for modeling some synchronization schemes. For this purpose, we need to define additional synchronization mechanisms. These mechanisms are provided by the condition construct. A programmer who needs to write a tailor-made synchronization scheme can define one or more variables of type condition:
 The only operations that can be invoked on a condition variable are wait() and signal(). The operation
The only operations that can be invoked on a condition variable are wait() and signal(). The operation

means that the process invoking this operation is suspended until another process invokes

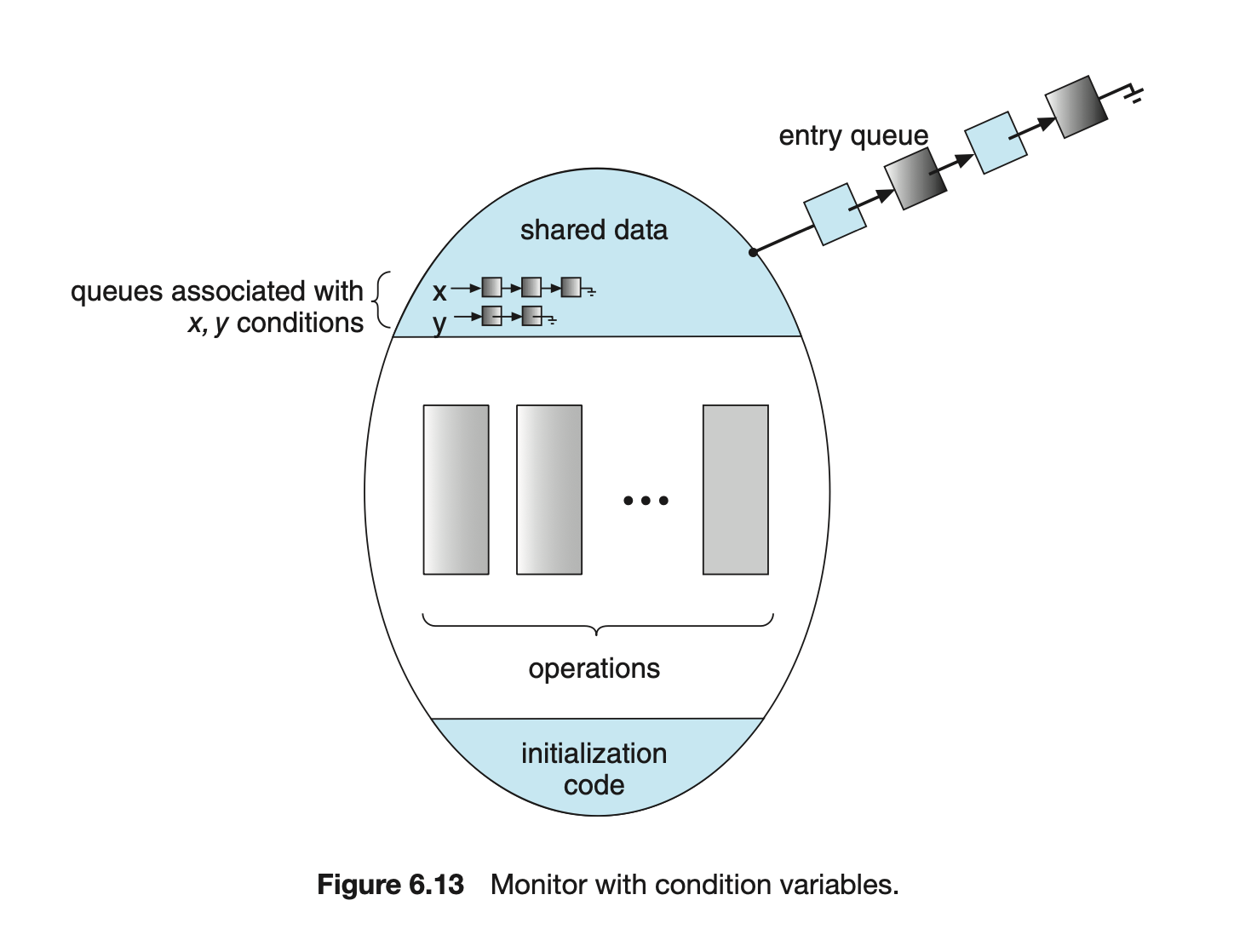
The x.signal() operation resumes exactly one suspended process. If no process is suspended, then the signal() operation has no effect; that is, the state of x is the same as if the operation had never been executed (Figure 6.13). Contrast this operation with the signal() operation associated with semaphores, which always affects the state of the semaphore.
Now suppose that, when the x.signal() operation is invoked by a process , there exists a suspended process associated with condition x. Clearly, if the suspended process is allowed to resume its execution, the signaling process must wait. Otherwise, both and would be active simultaneously within the monitor. Note, however, that conceptually both processes can continue with their execution. Two possibilities exist:
- Signal and wait. either waits until leaves the monitor or waits for another condition.
- Signal and continue. either waits until leaves the monitor or waits for another condition.
There are reasonable arguments in favor of adopting either option. On the one hand, since was already executing in the monitor, the signal-and-continue method seems more reasonable. On the other, if we allow thread to continue, then by the time is resumed, the logical condition for which was waiting may no longer hold. A compromise between these two choices exists as well: when thread executes the signal operation, it immediately leaves the monitor. Hence, is immediately resumed.
 Many programming languages have incorporated the idea of the monitor as described in this section, including Java and C#. Other languages--such as Erlang--provide concurrency support using a similar mechanism.
Many programming languages have incorporated the idea of the monitor as described in this section, including Java and C#. Other languages--such as Erlang--provide concurrency support using a similar mechanism.
6.7.2 Implementing a Monitor Using Semaphores
We now consider a possible implementation of the monitor mechanism using semaphores. For each monitor, a binary semaphore mutex (initialized to 1) is provided to ensure mutual exclusion. A process must execute wait(mutex) before entering the monitor and must execute signal(mutex) after leaving the monitor.
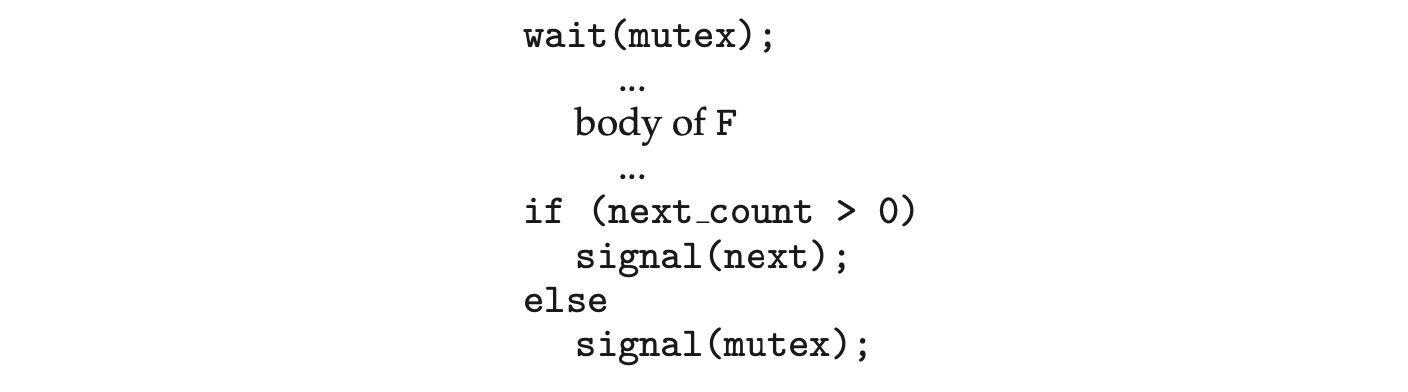
We will use the signal-and-wait scheme in our implementation. Since a signaling process must wait until the resumed process either leaves or waits, an additional binary semaphore, next, is introduced, initialized to 0. The signaling processes can use next to suspend themselves. An integer variable next_count is also provided to count the number of processes suspended on next. Thus, each external function F is replaced by
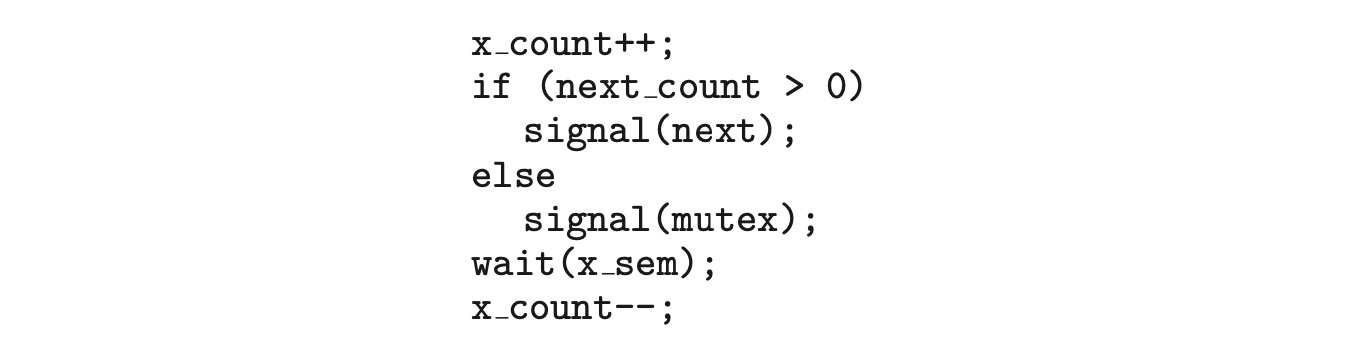
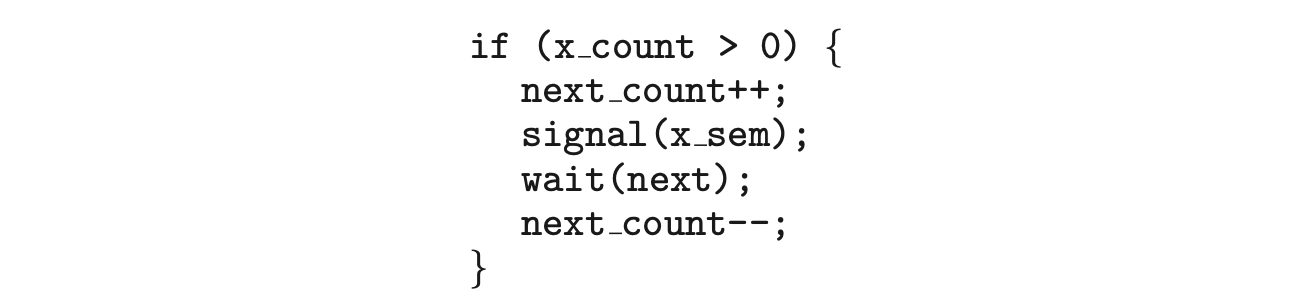
Mutual exclusion within a monitor is ensured. We can now describe how condition variables are implemented as well. For each condition x, we introduce a binary semaphore x_sem and an integer variable x_count, both initialized to 0. The operation x.wait() can now be implemented as
 The operation x.signal() can be implemented as
The operation x.signal() can be implemented as
 This implementation is applicable to the definitions of monitors given by both Hoare and Brinch-Hansen (see the bibliographical notes at the end of the chapter). In some cases, however, the generality of the implementation is unnecessary, and a significant improvement in efficiency is possible. We leave this problem to you in Exercise 6.27.
This implementation is applicable to the definitions of monitors given by both Hoare and Brinch-Hansen (see the bibliographical notes at the end of the chapter). In some cases, however, the generality of the implementation is unnecessary, and a significant improvement in efficiency is possible. We leave this problem to you in Exercise 6.27.
6.7.3 Resuming Processes within a Monitor
We turn now to the subject of process-resumption order within a monitor. If several processes are suspended on condition x, and an x.signal() operation is executed by some process, then how do we determine which of the suspended processes should be resumed next? One simple solution is to use a first-come, first-served (FCFS) ordering, so that the process that has been waiting the longest is resumed first. In many circumstances, however, such a simple scheduling scheme is not adequate. In these circumstances, the conditional-wait construct can be used. This construct has the form
 where c is an integer expression that is evaluated when the wait() operation is executed. The value of c, which is called a priority number, is then stored with the name of the process that is suspended. When
where c is an integer expression that is evaluated when the wait() operation is executed. The value of c, which is called a priority number, is then stored with the name of the process that is suspended. When x.signal() is executed, the process with the smallest priority number is resumed next.
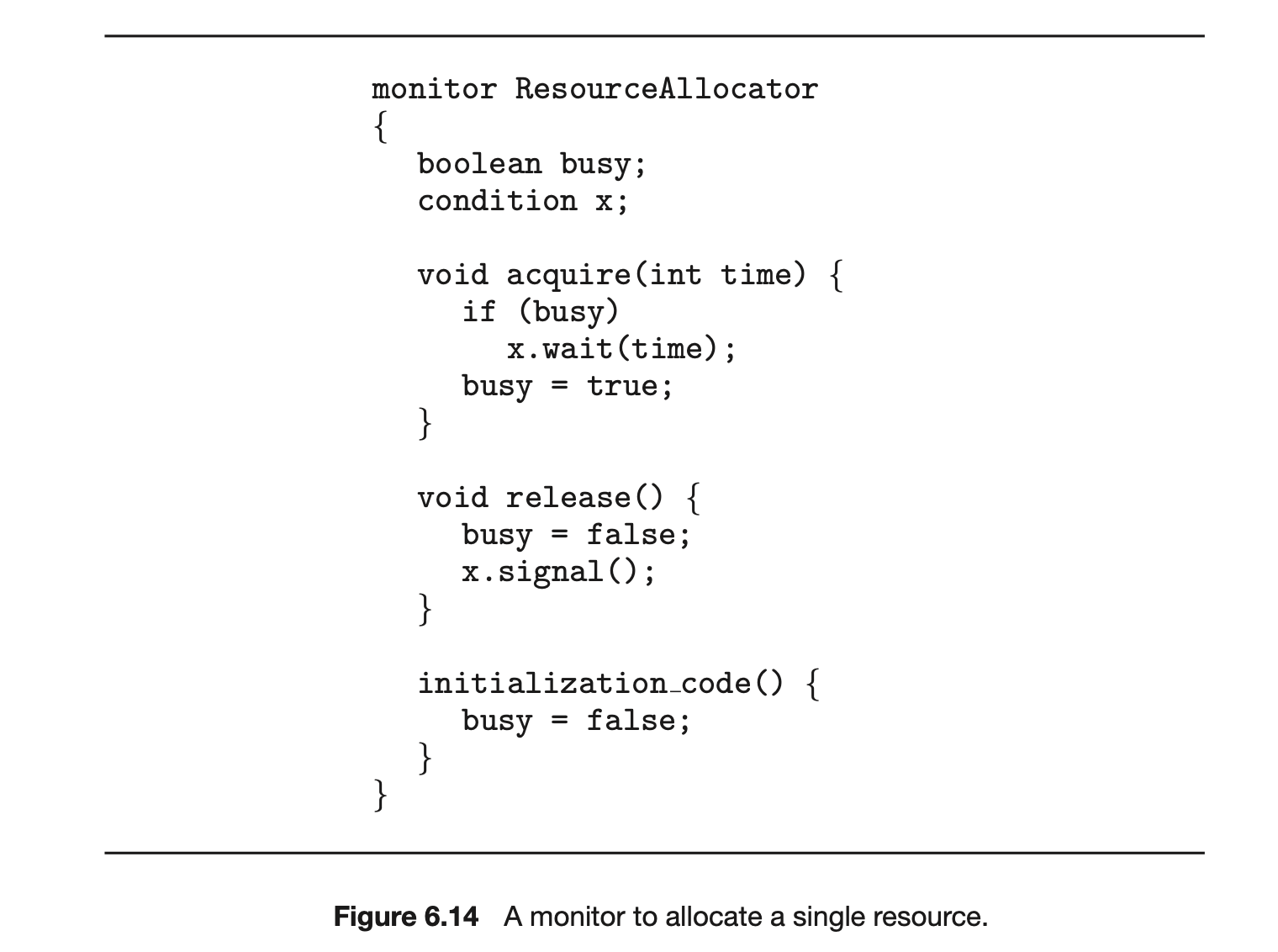
To illustrate this new mechanism, consider the ResourceAllocator monitor shown in Figure 6.14, which controls the allocation of a single resource among competing processes. Each process, when requesting an allocation of this resource, specifies the maximum time it plans to use the resource. The monitor allocates the resource to the process that has the shortest time-allocation request. A process that needs to access the resource in question must observe the following sequence:
 where R is an instance of type ResourceAllocator. Unfortunately, the monitor concept cannot guarantee that the preceding access sequence will be observed. In particular, the following problems can occur:
where R is an instance of type ResourceAllocator. Unfortunately, the monitor concept cannot guarantee that the preceding access sequence will be observed. In particular, the following problems can occur:
- A process might access a resource without first gaining access permission to the resource.
- A process might never release a resource once it has been granted access to the resource.
- A process might attempt to release a resource that it never requested.
- A process might request the same resource twice (without first releasing the resource).
The same difficulties are encountered with the use of semaphores, and these difficulties are similar in nature to those that encouraged us to develop the monitor constructs in the first place. Previously, we had to worry about the correct use of semaphores. Now, we have to worry about the correct use of higher-level programmer-defined operations, with which the compiler can no longer assist us.
One possible solution to the current problem is to include the resource-access operations within the ResourceAllocator monitor. However, using this solution will mean that scheduling is done according to the built-in monitor-scheduling algorithm rather than the one we have coded.
To ensure that the processes observe the appropriate sequences, we must inspect all the programs that make use of the ResourceAllocator monitor and its managed resource. We must check two conditions to establish the correctness of this system. First, user processes must always make their calls on the monitor in a correct sequence. Second, we must be sure that an uncooperative process does not simply ignore the mutual-exclusion gateway provided by the monitor and try to access the shared resource directly, without using the access protocols. Only if these two conditions can be ensured can we guarantee that no time-dependent errors will occur and that the scheduling algorithm will not be defeated.
Although this inspection may be possible for a small, static system, it is not reasonable for a large system or a dynamic system. This access-control problem can be solved only through the use of the additional mechanisms that are described in Chapter 17.
6.8 Liveness
One consequence of using synchronization tools to coordinate access to critical sections is the possibility that a process attempting to enter its critical section will wait indefinitely. Recall that in Section 6.2, we outlined three criteria that solutions to the critical-section problem must satisfy. Indefinite waiting violates two of these --the progress and bounded-waiting criteria.
Liveness refers to a set of properties that a system must satisfy to ensure that processes make progress during their execution life cycle. A process waiting indefinitely under the circumstances just described is an example of a "liveness failure."
There are many different forms of liveness failure; however, all are generally characterized by poor performance and responsiveness. A very simple example of a liveness failure is an infinite loop. A busy wait loop presents the possibility of a liveness failure, especially if a process may loop an arbitrarily long period of time. Efforts at providing mutual exclusion using tools such as mutex locks and semaphores can often lead to such failures in concurrent programming. In this section, we explore two situations that can lead to liveness failures.
6.8.1 Deadlock
The implementation of a semaphore with a waiting queue may result in a situation where two or more processes are waiting indefinitely for an event that can be caused only by one of the waiting processes. The event in question is the execution of a signal() operation. When such a state is reached, these processes are said to be deadlocked.
To illustrate this, consider a system consisting of two processes, and , each accessing two semaphores, S and Q, set to the value 1:
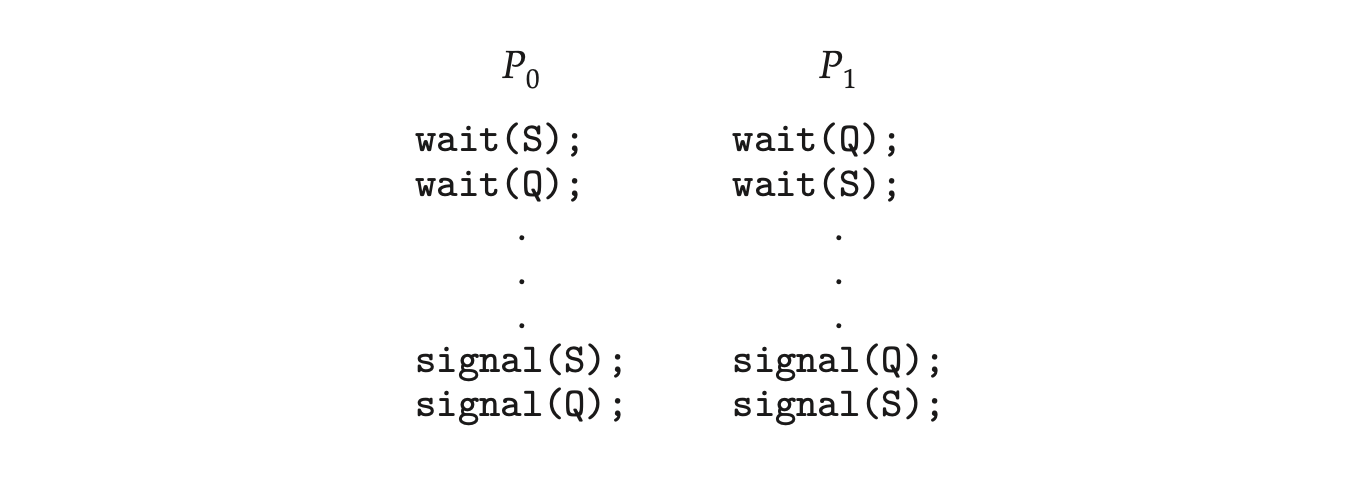 Suppose that executes
Suppose that executes wait(S) and then executes wait(Q). When executes wait(Q), it must wait until executes signal(Q). Similarly, when executes wait(S), it must wait until executes signal(S). Since these signal() operations cannot be executed, and are deadlocked.
We say that a set of processes is in a deadlocked state when every process in the set is waiting for an event that can be caused only by another process in the set. The “events” with which we are mainly concerned here are the acquisition and release of resources such as mutex locks and semaphores. Other types of events may result in deadlocks, as we show in more detail in Chapter 8. In that chapter, we describe various mechanisms for dealing with the deadlock problem, as well as other forms of liveness failures.
6.8.2 Priority Inversion
A scheduling challenge arises when a higher-priority process needs to read or modify kernel data that are currently being accessed by a lower-priority process--or a chain of lower-priority processes. Since kernel data are typically protected with a lock, the higher-priority process will have to wait for a lower-priority one to finish with the resource. The situation becomes more complicated if the lower-priority process is preempted in favor of another process with a higher priority.
As an example, assume we have three processes--, , and --whose priorities follow the order . Assume that process requires a semaphore , which is currently being accessed by process . Ordinarily, process would wait for to finish using resource . However, now suppose that process becomes runnable, thereby preempting process . Indirectly, a process with a lower priority--process --has affected how long process must wait for to relinquish resource .
This liveness problem is known as priority inversion, and it can occur only in systems with more than two priorities. Typically, priority inversion is avoided by implementing a priority-inheritance protocol. According to this protocol, all processes that are accessing resources needed by a higher-priority process inherit the higher priority until they are finished with the resources in question. When they are finished, their priorities revert to their original values. In the example above, a priority-inheritance protocol would allow process to temporarily inherit the priority of process , thereby preventing process from preempting its execution. When process had finished using resource , it would relinquish its inherited priority from and assume its original priority. Because resource would now be available, process --not --would run next.
6.9 Evaluation
We have described several different synchronization tools that can be used to solve the critical-section problem. Given correct implementation and usage, these tools can be used effectively to ensure mutual exclusion as well as address liveness issues. With the growth of concurrent programs that leverage the power of modern multicore computer systems, increasing attention is being paid to the performance of synchronization tools. Trying to identify when to use which tool, however, can be a daunting challenge. In this section, we present some simple strategies for determining when to use specific synchronization tools.
The hardware solutions outlined in Section 6.4 are considered very low level and are typically used as the foundations for constructing other synchronization tools, such as mutex locks. However, there has been a recent focus on using the CAS instruction to construct lock-free algorithms that provide protection from race conditions without requiring the overhead of locking. Although these lock-free solutions are gaining popularity due to low overhead
Priority inversion and the Mars Pathfinder
Priority inversion can be more than a scheduling inconvenience. On systems with tight time constraints--such as real-time systems--priority inversion can cause a process to take longer than it should to accomplish a task. When that happens, other failures can cascade, resulting in system failure.
Consider the Mars Pathfinder, a NASA space probe that landed a robot, the Sojourner rover, on Mars in 1997 to conduct experiments. Shortly after the Sojourner began operating, it started to experience frequent computer resets. Each reset reinitialized all hardware and software, including communications. If the problem had not been solved, the Sojourner would have failed in its mission.
The problem was caused by the fact that one high-priority task, "bc_dist," was taking longer than expected to complete its work. This task was being forced to wait for a shared resource that was held by the lower-priority "ASI/MET" task, which in turn was preempted by multiple medium-priority tasks. The "bc_dist" task would stall waiting for the shared resource, and ultimately the "bc_sched" task would discover the problem and perform the reset. The Sojourner was suffering from a typical case of priority inversion.
The operating system on the Sojourner was the VxWorks real-time operating system, which had a global variable to enable priority inheritance on all semaphores. After testing, the variable was set on the Sojourner (on Mars!), and the problem was solved.
A full description of the problem, its detection, and its solution was written by the software team lead and is available at http://research.microsoft.com/en-us/um/people/mbj/mars_pathfinder/authoritative.account.html.
and ability to scale, the algorithms themselves are often difficult to develop and test. (In the exercises at the end of this chapter, we ask you to evaluate the correctness of a lock-free stack.)
CAS-based approaches are considered an optimistic approach--you optimistically first update a variable and then use collision detection to see if another thread is updating the variable concurrently. If so, you repeatedly retry the operation until it is successfully updated without conflict. Mutual-exclusion locking, in contrast, is considered a pessimistic strategy; you assume another thread is concurrently updating the variable, so you pessimistically acquire the lock before making any updates.
The following guidelines identify general rules concerning performance differences between CAS-based synchronization and traditional synchronization (such as mutex locks and semaphores) under varying contention loads:
- Uncontended. Although both options are generally fast, CAS protection will be somewhat faster than traditional synchronization.
- Moderate contention. CAS protection will be faster--possibly much faster --than traditional synchronization.
- High contention. Under very highly contended loads, traditional synchronization will ultimately be faster than CAS-based synchronization.
Moderate contention is particularly interesting to examine. In this scenario, the CAS operation succeeds most of the time, and when it fails, it will iterate through the loop shown in Figure 6.8 only a few times before ultimately succeeding. By comparison, with mutual-exclusion locking, any attempt to acquire a contended lock will result in a more complicated -- and time-intensive -- code path that suspends a thread and places it on a wait queue, requiring a context switch to another thread.
The choice of a mechanism that addresses race conditions can also greatly affect system performance. For example, atomic integers are much lighter weight than traditional locks, and are generally more appropriate than mutex locks or semaphores for single updates to shared variables such as counters. We also see this in the design of operating systems where spinlocks are used on multiprocessor systems when locks are held for short durations. In general, mutex locks are simpler and require less overhead than semaphores and are preferable to binary semaphores for protecting access to a critical section. However, for some uses--such as controlling access to a finite number of resources--a counting semaphore is generally more appropriate than a mutex lock. Similarly, in some instances, a reader-writer lock may be preferred over a mutex lock, as it allows a higher degree of concurrency (that is, multiple readers).
The appeal of higher-level tools such as monitors and condition variables is based on their simplicity and ease of use. However, such tools may have significant overhead and, depending on their implementation, may be less likely to scale in highly contended situations.
Fortunately, there is much ongoing research toward developing scalable, efficient tools that address the demands of concurrent programming. Some examples include:
- Designing compilers that generate more efficient code.
- Developing languages that provide support for concurrent programming.
- Improving the performance of existing libraries and APIs.
In the next chapter, we examine how various operating systems and APIs available to developers implement the synchronization tools presented in this chapter.
6.10 Summary
- A race condition occurs when processes have concurrent access to shared data and the final result depends on the particular order in which concurrent accesses occur. Race conditions can result in corrupted values of shared data.
- A critical section is a section of code where shared data may be manipulated and a possible race condition may occur. The critical-section problemis to design a protocol whereby processes can synchronize their activity to cooperatively share data.
- A solution to the critical-section problem must satisfy the following three requirements: (1) mutual exclusion, (2) progress, and (3) bounded waiting. Mutual exclusion ensures that only one process at a time is active in its critical section. Progress ensures that programs will cooperatively determine what process will next enter its critical section. Bounded waiting limits how much time a program will wait before it can enter its critical section.
- Software solutions to the critical-section problem, such as Peterson's solution, do not work well on modern computer architectures.
- Hardware support for the critical-section problem includes memory barriers; hardware instructions, such as the compare-and-swap instruction; and atomic variables.
- A mutex lock provides mutual exclusion by requiring that a process acquire a lock before entering a critical section and release the lock on exiting the critical section.
- Semaphores, like mutex locks, can be used to provide mutual exclusion. However, whereas a mutex lock has a binary value that indicates if the lock is available or not, a semaphore has an integer value and can therefore be used to solve a variety of synchronization problems.
- A monitor is an abstract data type that provides a high-level form of process synchronization. A monitor uses condition variables that allow processes to wait for certain conditions to become true and to signal one another when conditions have been set to true.
- Solutions to the critical-section problem may suffer from liveness problems, including deadlock.
- The various tools that can be used to solve the critical-section problem as well as to synchronize the activity of processes can be evaluated under varying levels of contention. Some tools work better under certain contention loads than others.
Practice Exercises
6.1 In Section 6.4, we mentioned that disabling interrupts frequently can affect the system's clock. Explain why this can occur and how such effects can be minimized.
6.2 What is the meaning of the term busy waiting? What other kinds of waiting are there in an operating system? Can busy waiting be avoided altogether? Explain your answer.
6.3 Explain why spinlocks are not appropriate for single-processor systems yet are often used in multiprocessor systems.
6.4 Show that, if the wait() and signal() semaphore operations are not executed atomically, then mutual exclusion may be violated.
6.5 Illustrate how a binary semaphore can be used to implement mutual exclusion among processes.
6.6 Race conditions are possible in many computer systems. Consider a banking system that maintains an account balance with two functions: deposit(amount) and withdraw(amount). These two functions are passed the amount that is to be deposited or withdrawn from the bank account balance. Assume that a husband and wife share a bank account. Concurrently, the husband calls the withdraw() function, and the wife calls deposit(). Describe how a race condition is possible and what might be done to prevent the race condition from occurring.
Further Reading
The mutual-exclusion problem was first discussed in a classic paper by [Dijkstra (1965)]. The semaphore concept was suggested by [Dijkstra (1965)]. The monitor concept was developed by [Brinch-Hansen (1973)]. [Hoare (1974)] gave a complete description of the monitor.
For more on the Mars Pathfinder problem see http://research.microsoft.co m/en-us/um/people/mbj/mars_pathfinder/authoritative_account.html
A thorough discussion of memory barriers and cache memory is presented in [Mckenney (2010)]. [Herlihy and Shavit (2012)] presents details on several issues related to multiprocessor programming, including memory models and compare-and-swap instructions. [Bahra (2013)] examines nonblocking algorithms on modern multicore systems.
Bibliography
[Bahra (2013)]: S. A. Bahra, "Nonblocking Algorithms and Scalable Multicore Programming", ACM queue, Volume 11, Number 5 (2013). [Brinch-Hansen (1973)]: P. Brinch-Hansen, Operating System Principles, Prentice Hall (1973). [Dijkstra (1965)]: E. W. Dijkstra, "Cooperating Sequential Processes", Technical report, Technological University, Eindhoven, the Netherlands (1965). [Herlihy and Shavit (2012)]: M. Herlihy and N. Shavit, The Art of Multiprocessor Programming, Revised First Edition, Morgan Kaufmann Publishers Inc. (2012). [Hoare (1974)]: C. A. R. Hoare, "Monitors: An Operating System Structuring Concept", Communications of the ACM, Volume 17, Number 10 (1974), pages 549-557. [Mckenney (2010)]: P. E. Mckenney, "Memory Barriers: a Hardware View for Software Hackers" (2010).
Chapter 6 Exercises
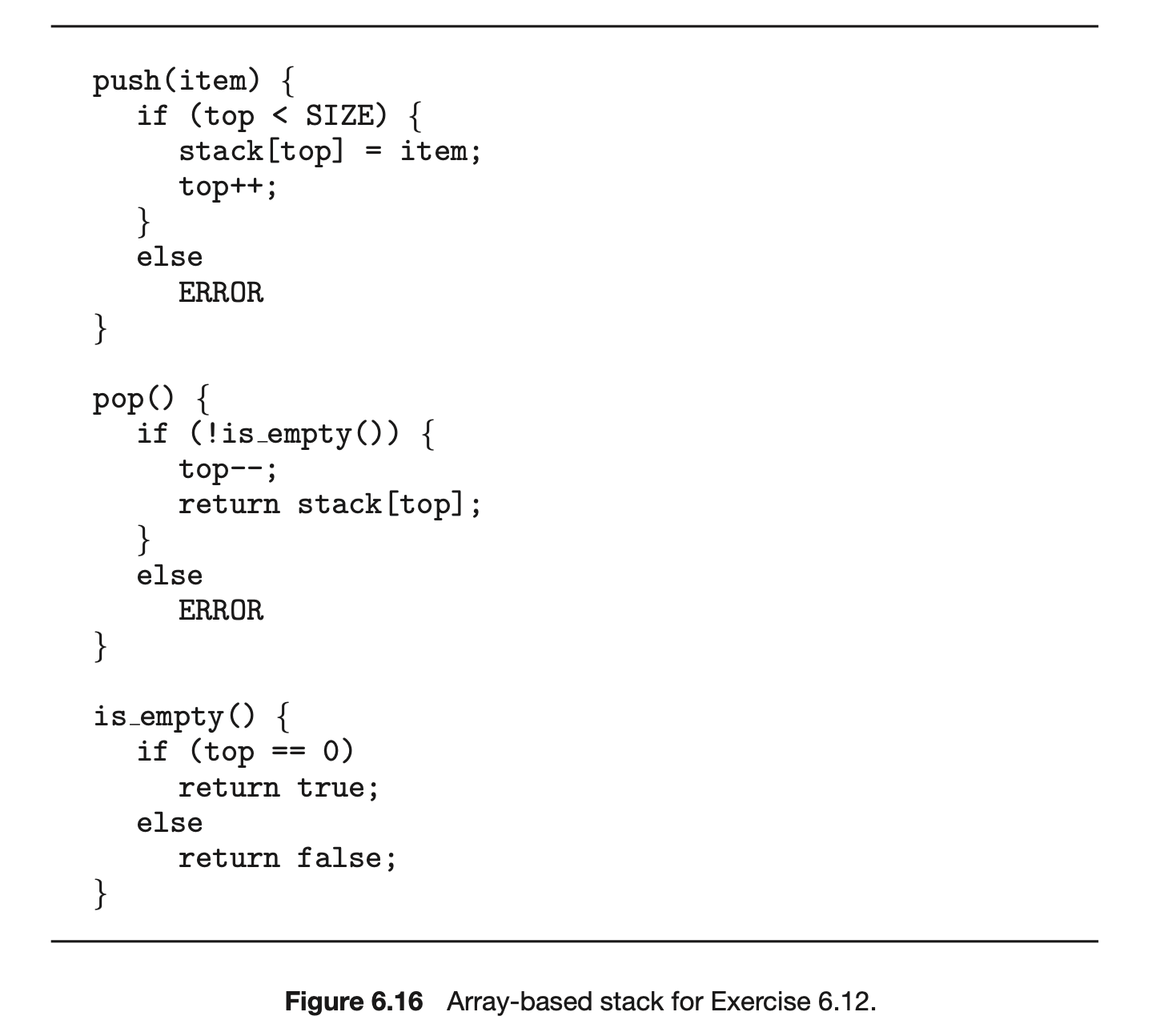
6.7 The pseudocode of Figure 6.15 illustrates the basic push() and pop() operations of an array-based stack. Assuming that this algorithm could be used in a concurrent environment, answer the following questions:
a. What data have a race condition? b. How could the race condition be fixed?
6.8 Race conditions are possible in many computer systems. Consider an online auction system where the current highest bid for each item must be maintained. A person who wishes to bid on an item calls the bid(amount) function, which compares the amount being bid to the current highest bid. If the amount exceeds the current highest bid, the highest bid is set to the new amount. This is illustrated below:

Describe how a race condition is possible in this situation and what might be done to prevent the race condition from occurring.
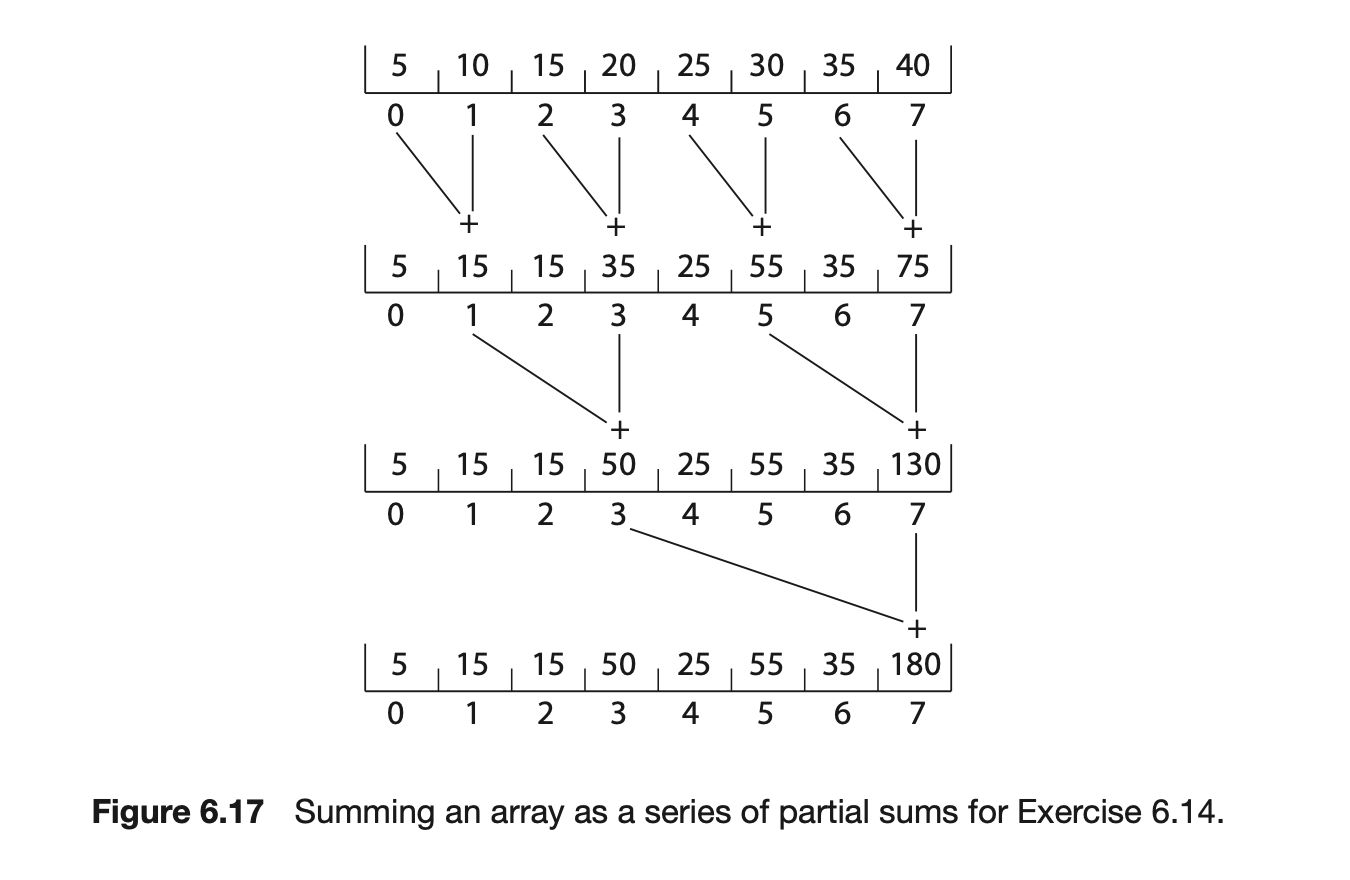
6.9 The following program example can be used to sum the array values of size elements in parallel on a system containing computing cores (there is a separate processor for each array element):
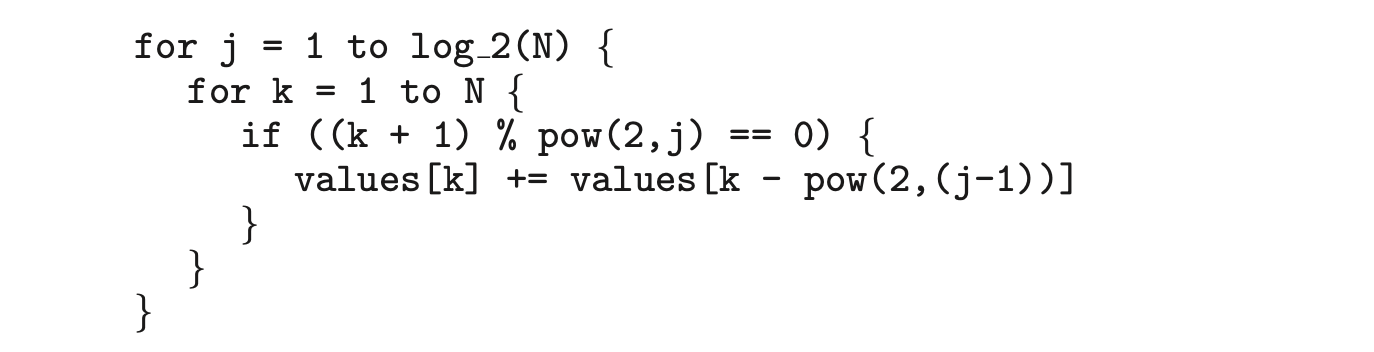 This has the effect of summing the elements in the array as a series of partial sums, as shown in Figure 6.16. After the code has executed, the sum of all elements in the array is stored in the last array location. Are there any race conditions in the above code example? If so, identify where they occur and illustrate with an example. If not, demonstrate why this algorithm is free from race conditions.
This has the effect of summing the elements in the array as a series of partial sums, as shown in Figure 6.16. After the code has executed, the sum of all elements in the array is stored in the last array location. Are there any race conditions in the above code example? If so, identify where they occur and illustrate with an example. If not, demonstrate why this algorithm is free from race conditions.
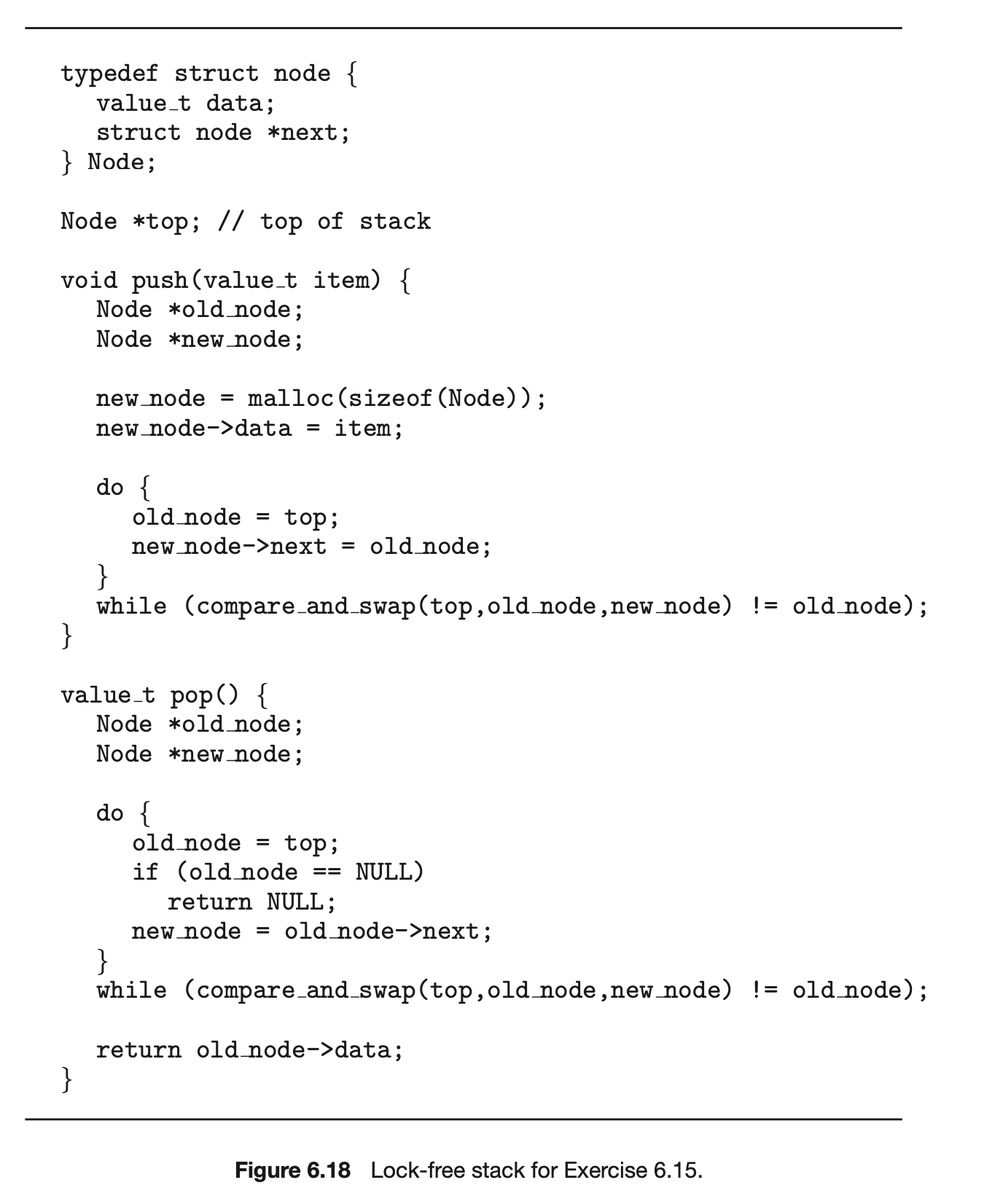
6.10 The compare_and_swap() instruction can be used to design lock-free data structures such as stacks, queues, and lists. The program example shown in Figure 6.17 presents a possible solution to a lock-free stack using CAS instructions, where the stack is represented as a linked list of Node elements with top representing the top of the stack. Is this implementation free from race conditions?
 6.11 One approach for using compare and swap() for implementing a spin-lock is as follows:
6.11 One approach for using compare and swap() for implementing a spin-lock is as follows:

A suggested alternative approach is to use the “compare and compare- and-swap” idiom, which checks the status of the lock before invoking the compare_and_swap() operation. (The rationale behind this approach is to invoke compare_and_swap()only if the lock is currently available.) This strategy is shown below:
 Does this "compare and compare-and-swap" idiom work appropriately for implementing spinlocks? If so, explain. If not, illustrate how the integrity of the lock is compromised.
Does this "compare and compare-and-swap" idiom work appropriately for implementing spinlocks? If so, explain. If not, illustrate how the integrity of the lock is compromised.
6.12 Some semaphore implementations provide a function getValue() that returns the current value of a semaphore. This function may, for instance, be invoked prior to calling wait() so that a process will only call wait() if the value of the semaphore is > 0, thereby preventing blocking while waiting for the semaphore. For example:
 Many developers argue against such a function and discourage its use. Describe a potential problem that could occur when using the function getValue() in this scenario.
Many developers argue against such a function and discourage its use. Describe a potential problem that could occur when using the function getValue() in this scenario.
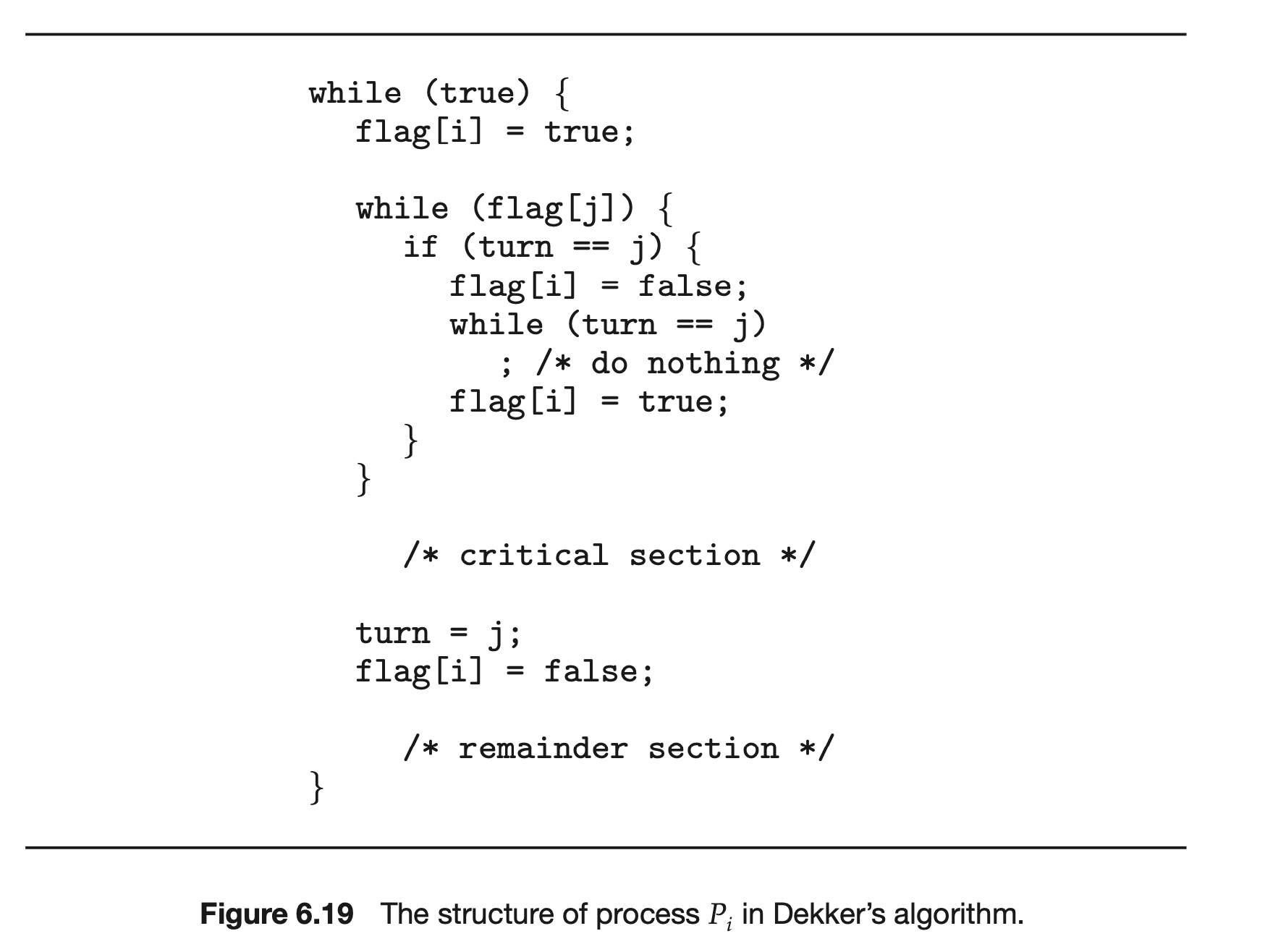
6.13 The first known correct software solution to the critical-section problem for two processes was developed by Dekker. The two processes, and , share the following variables:
 The structure of process (i == 0 or 1) is shown in Figure 6.18. The other process is (j == 1 or 0). Prove that the algorithm satisfies all three requirements for the critical-section problem.
The structure of process (i == 0 or 1) is shown in Figure 6.18. The other process is (j == 1 or 0). Prove that the algorithm satisfies all three requirements for the critical-section problem.
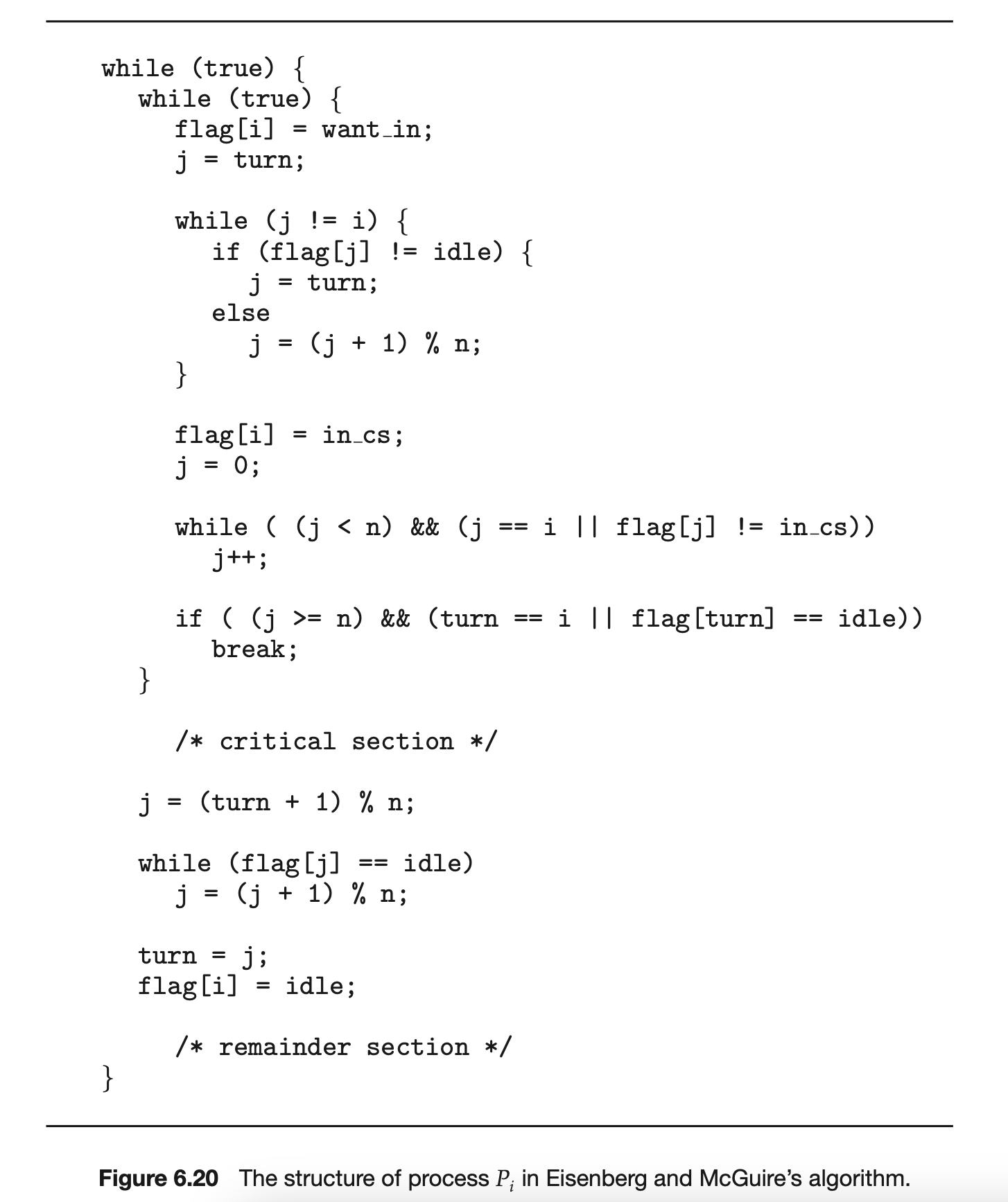
6.14 The first known correct software solution to the critical-section problem for processes with a lower bound on waiting of turns was presented by Eisenberg and McGuire. The processes share the following variables:

 All the elements of flag are initially idle. The initial value of turn is immaterial (between 0 and n-1). The structure of process is shown in Figure 6.19. Prove that the algorithm satisfies all three requirements for the critical-section problem.
All the elements of flag are initially idle. The initial value of turn is immaterial (between 0 and n-1). The structure of process is shown in Figure 6.19. Prove that the algorithm satisfies all three requirements for the critical-section problem.
6.15: Explain why implementing synchronization primitives by disabling interrupts is not appropriate in a single-processor system if the synchronization primitives are to be used in user-level programs.
6.16: Consider how to implement a mutex lock using the compare_and_swap() instruction. Assume that the following structure defining the mutex lock is available:

The value (available == 0) indicates that the lock is available, and a value of 1 indicates that the lock is unavailable. Using this struct, illustrate how the following functions can be implemented using the compare_and_swap() instruction:
- void acquire(lock *mutex)
- void release(lock *mutex)
Be sure to include any initialization that may be necessary.
6.17 Explain why interrupts are not appropriate for implementing synchro- nization primitives in multiprocessor systems.
6.18 The implementation of mutex locks provided in Section 6.5 suffers from busy waiting. Describe what changes would be necessary so that a process waiting to acquire a mutex lock would be blocked and placed into a waiting queue until the lock became available.
6.19 Assume that a system has multiple processing cores. For each of the following scenarios, describe which is a better locking mechanism—a spinlock or a mutex lock where waiting processes sleep while waiting for the lock to become available:
- The lock is to be held for a short duration.
- The lock is to be held for a long duration.
- A thread may be put to sleep while holding the lock.
6.20 Assume that a context switch takes time. Suggest an upper bound (in terms of ) for holding a spinlock. If the spinlock is held for any longer, a mutex lock (where waiting threads are put to sleep) is a better alternative.
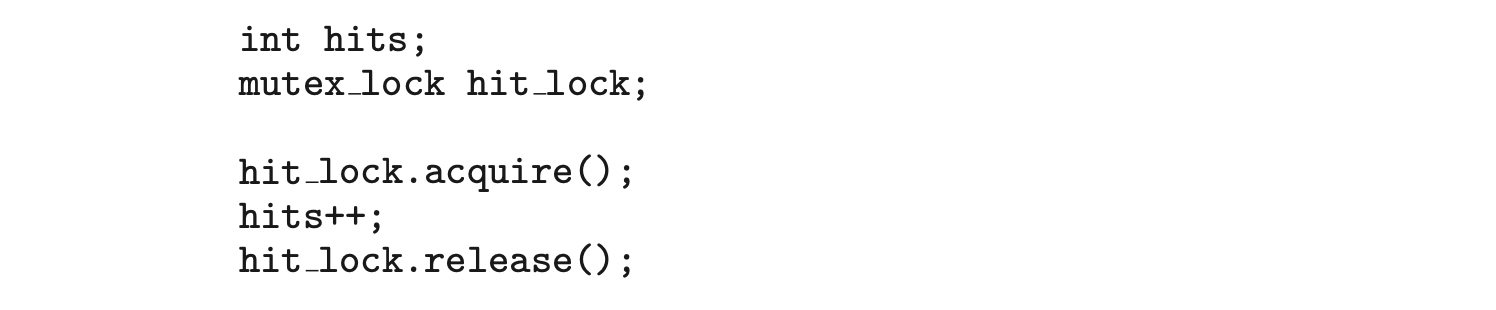
6.21 A multithreaded web server wishes to keep track of the number of requests it services (known as hits). Consider the two following strategies to prevent a race condition on the variable hits. The first strategy is to use a basic mutex lock when updating hits:
 A second strategy is to use an atomic integer:
A second strategy is to use an atomic integer:
 Explain which of these two strategies is more efficient.
Explain which of these two strategies is more efficient.
6.22 Consider the code example for allocating and releasing processes shown in Figure 6.20.
a. Identify the race condition(s).
b. Assume you have a mutex lock named mutex with the operations acquire() and release(). Indicate where the locking needs to be placed to prevent the race condition(s).
c. Could we replace the integer variable
 with the atomic integer
with the atomic integer
 to prevent the race condition(s)?
to prevent the race condition(s)?
6.23 Servers can be designed to limit the number of open connections. For example, a server may wish to have only socket connections at any point in time. As soon as connections are made, the server will not accept another incoming connection until an existing connection is released. Illustrate how semaphores can be used by a server to limit the number of concurrent connections.
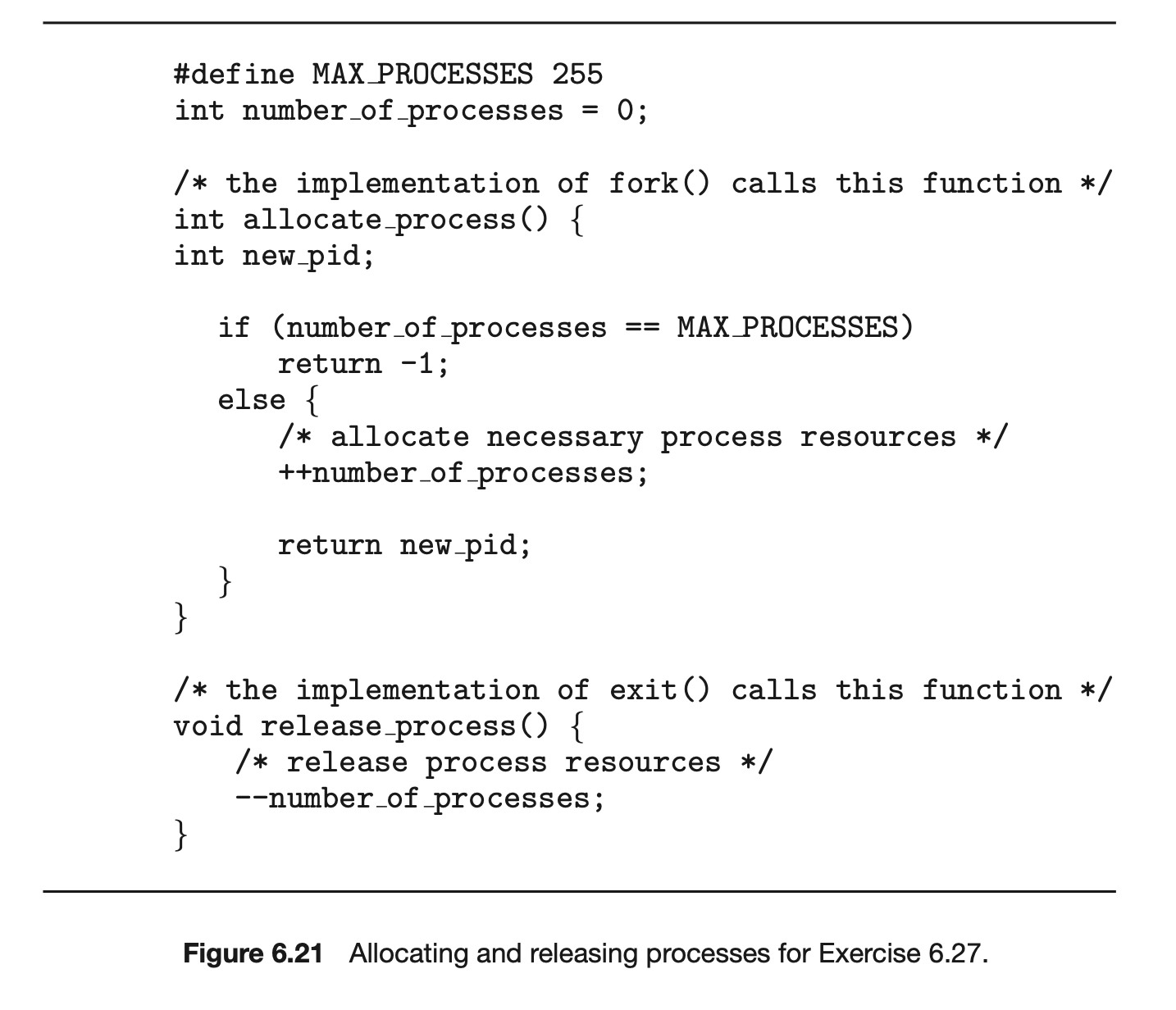 6.24 In Section 6.7, we use the following illustration as an incorrect use of semaphores to solve the critical-section problem:
6.24 In Section 6.7, we use the following illustration as an incorrect use of semaphores to solve the critical-section problem:
 Explain why this is an example of a liveness failure.
Explain why this is an example of a liveness failure.
6.25 Demonstrate that monitors and semaphores are equivalent to the degree that they can be used to implement solutions to the same types of synchronization problems.
6.26 Describe how the signal() operation associated with monitors differs from the corresponding operation defined for semaphores.
6.27 Suppose the signal() statement can appear only as the last statement in a monitor function. Suggest how the implementation described in Section 6.7 can be simplified in this situation.
6.28 Consider a system consisting of processes , each of which has a unique priority number. Write a monitor that allocates three identical printers to these processes, using the priority numbers for deciding the order of allocation.
6.29 A file is to be shared among different processes, each of which has a unique number. The file can be accessed simultaneously by several processes, subject to the following constraint: the sum of all unique numbers associated with all the processes currently accessing the file must be less than . Write a monitor to coordinate access to the file.
6.30 When a signal is performed on a condition inside a monitor, the signaling process can either continue its execution or transfer control to the process that is signaled. How would the solution to the preceding exercise differ with these two different ways in which signaling can be performed?
6.31 Design an algorithm for a monitor that implements an alarm clock that enables a calling program to delay itself for a specified number of time units (ticks). You may assume the existence of a real hardware clock that invokes a function tick() in your monitor at regular intervals.
6.32 Discuss ways in which the priority inversion problem could be addressed in a real-time system. Also discuss whether the solutions could be implemented within the context of a proportional share scheduler.